Answer:
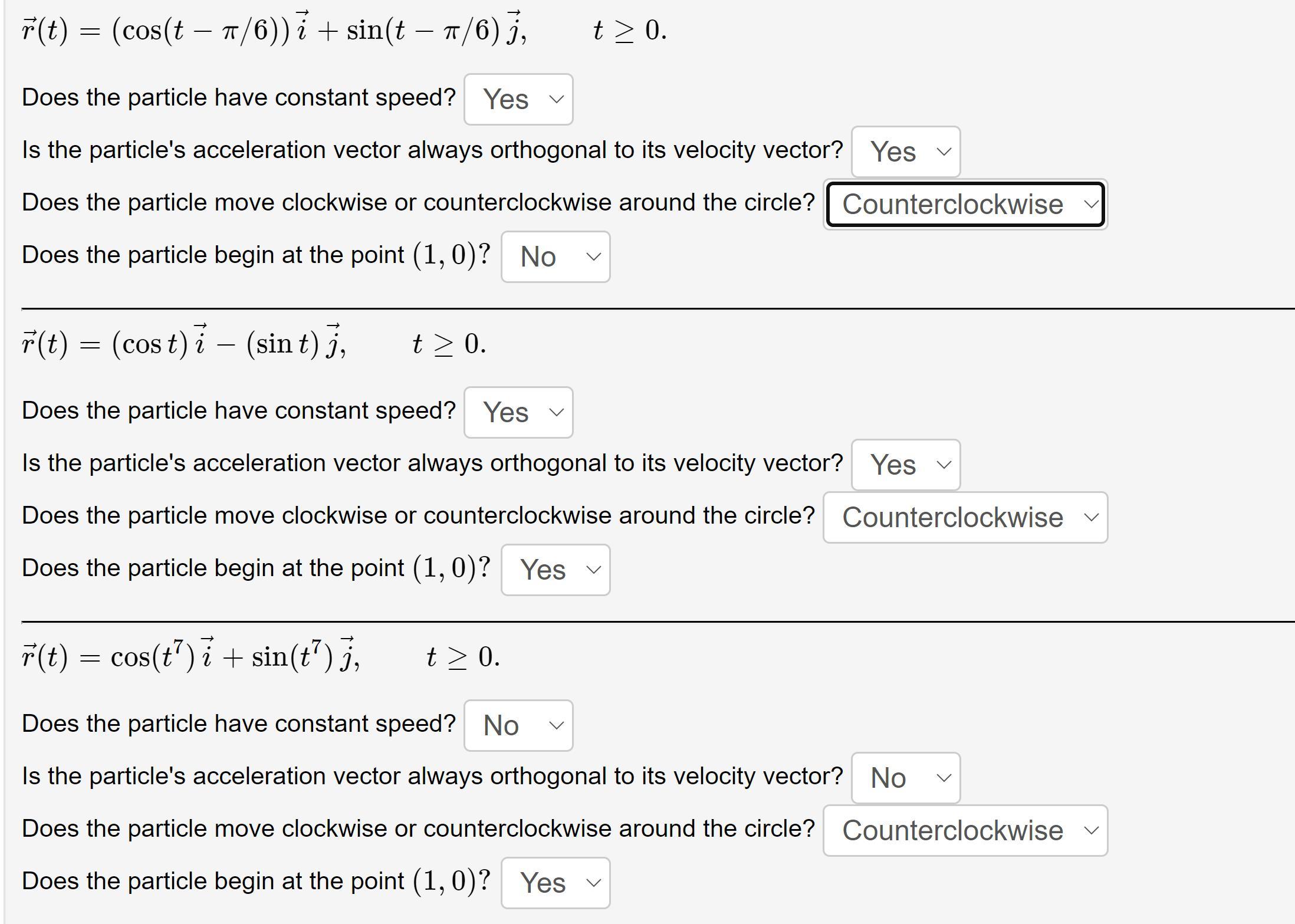
- correct (y, y, CCW, n)
- needs correction (y, y, CW, y)
- correct (n, n, CCW, y)
Step-by-step explanation:
You want to know the starting position, rotation direction, speed, and acceleration for three points specified by different angle relations.
<h3>Setup</h3>
To save "ink" and typing effort, we will write the vector ...
r(t) = a·cos(θ(t))i +b·sin(θ(t))j
in the more compact notation
r(t) = √(a²+b²)∠α(t) . . . . . where tan(α(t)) = (b/a)tan(θ(t))
Here, √(a²+b²) = 1 in all cases. Then the initial position and direction of motion are ...
r(0) = 1∠α(0) . . . . . . . . . . . . . . 1∠0 corresponds to 1i+0j = (1, 0)
direction = sign(α'(0⁺)) . . . . . . where positive is counterclockwise
The acceleration is the sum of the radial and tangential accelerations. When the speed is not constant, the tangential acceleration is non-zero, and the acceleration is not orthogonal to the velocity.
<h3>A. r(t) = 1∠(t -π/6)</h3>
The speed is d(t -π/6)/dt = 1, a constant.
Because the speed is constant, the acceleration is orthogonal to the velocity.
The sign of the speed is positive, so the direction is CCW.
The particle begins at the point 1∠(-π/6) ≠ 1∠0.
<h3>B. r(t) = 1∠-t</h3>
The speed is d(-t)/dt = -1, a constant.
Because the speed is constant, the acceleration is orthogonal to the velocity.
The sign of the speed is negative, so the direction is CW.
The particle begins at the point 1∠0.
<h3>C. r(t) = 1∠t^7</h3>
The angular speed is d(t^7)/dt = 7·t^6, not constant.
Because the speed is not constant, the acceleration is not orthogonal to the velocity.
The sign of the angular speed is positive for t>0, so the direction is CCW.
The particle begins at the point 1∠0.