Answer:
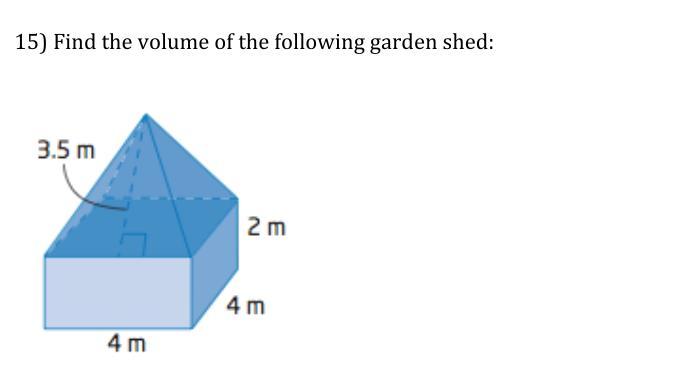
47.3 m³
Step-by-step explanation:
The garden shed is made up of a rectangular prism and a pyramid.
<h3><u>Volume of a rectangular prism</u></h3>

<h3><u>Volume of a pyramid</u></h3>
<u />
From inspection of the given diagram, the slant height of the pyramid is 3.5 m.
Calculate the perpendicular height of the pyramid using Pythagoras Theorem:

Therefore:

<h3><u>Volume of the garden shed</u></h3>