Step-by-step explanation:
k(-5)= 6.(-5)+100
=30 + 100
=70
Equation 1) 2x - 3y = -1
Equation 2) y = x - 1
We want both equations to be in standard form (Ax+By=C) so we need to fix the second equation.
For the second equation, simply subtract x from both sides, so that x & y are on the same side of the equal sign :)
2) -x + y = -1
1) 2x - 3y = -1
Now, we have to multiply ALL of equation 2 by 2 so that both equations 1 & 2 have "2x" in them :)
2) 2(-x + y = -1)
Simplify.
2) -2x + 2y = -2
1) 2x - 3y = -1
Now, add these equations together.
-y = -3
Divide both sides by -1.
y = 3
Now, plug in 3 for y in the first equation.
1) 2x - 3y = -1
2x - 3(3) = -1
Simplify.
2x - 9 = -1
Then, add 9 to both sides.
2x = -1 + 9
Simplify.
2x = 8
Divide both sides by 2.
x = 4
So, x = 4 & y = 3
~Hope I helped!~
Step-by-step explanation:
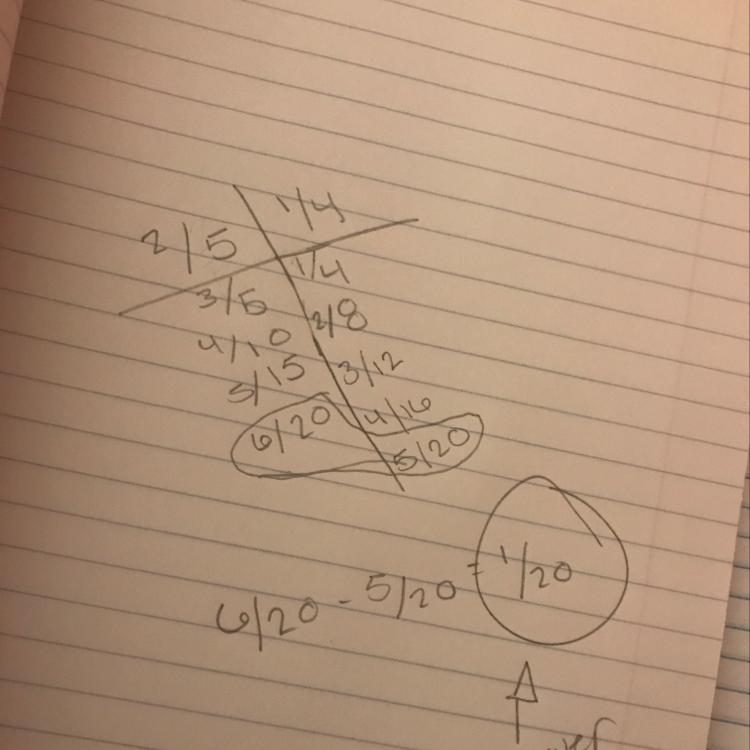
A-B ={1}
B-A ={5,7}
those are the answers
This caption needs to be 20 words long, but my picture explains everything lol... i hope this helps :)




We clearly get the maximum at x=-3, in which case y=0
Answer: 0, last choice