Answer : Encoding
Explanation : Encoding refers to correctly coding the message so that the receiver gets the clear message without feating any misunderstanding.
Answer:
Explanation:
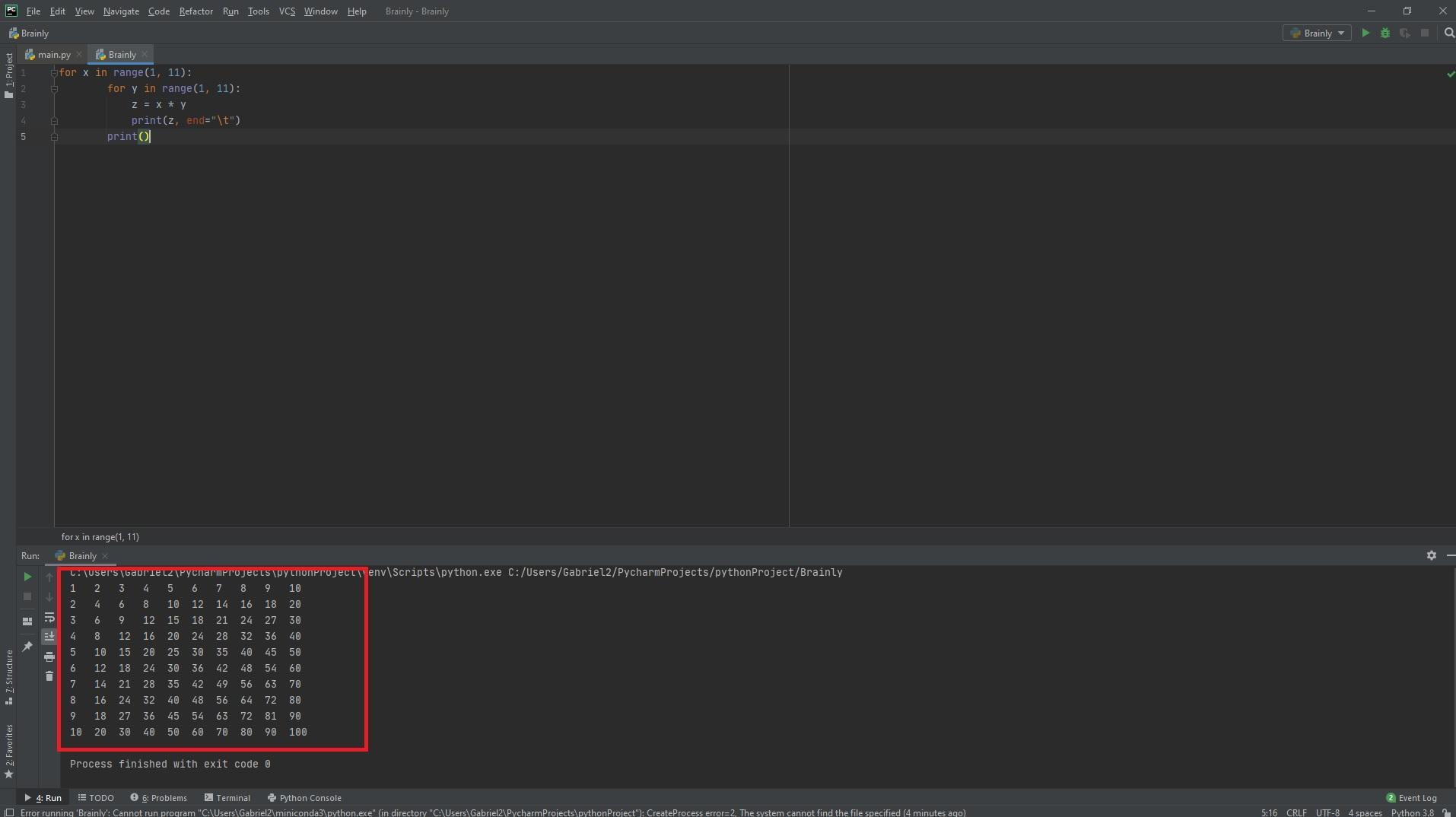
The following python code creates the multiplication table for 10 rows and 10 columns. This code uses nested for loops to traverse the table and print out the product of each multiplication. The image attached shows the output of the code.
for x in range(1, 11):
for y in range(1, 11):
z = x * y
print(z, end="\t")
print()
If an algorithm created to help make hiring decisions is based on previous unfair decisions, then the algorithm may be flawed.
<h3>What are algorithms being used for?</h3>
Algorithms are known to be tools that are made to help in calculation, data processing, and a kind of automated reasoning.
Hence, If an algorithm created to help make hiring decisions is based on previous unfair decisions, then the algorithm may be flawed.
Learn more about algorithm from
brainly.com/question/23282908
#SPJ1
The customer should consider buying the hard drive
Complete Question:
1. A wireless technology standard for exchanging data over short distances
2. A particular brand of mobile phone/PDA
3. A network that operates over a limited distance, usually for one or a few users
1. Bluetooth
2. PAN
3. Blackberry
Answer:
1. Bluetooth 2. Blackberry . 3. PAN
Explanation:
1. Bluetooth is a wireless technology standard, used in order to exchange data between mobile devices, like smartphones, tablets, headsets, wearables, over short distances in a one-to-one fashion (which means that it is not possible to build a network based in Bluetooth).
2. Blackberry is a brand of mobile phones/PDAs, very popular a decade ago, because it was the first one to allow mobile users to access e-mails and messages from anywhere, at any time.
3. PAN (Personal Area Network) is an ad-hoc network that it is only available for data exchange at a very short distance, within the reach of a person, i.e. a few meters as a maximum.
It is thought to allow someone to interact with his nearest environment (laptop, tablet, PDA) and it can be wireless (like Bluetooth) or wired (via USB cables).