I’m positive it will be Alpines fault
Galapagos Island
Explanation:
Charles Darwin was a notable naturalist in the 19th century that developed the theory of evolution of species by natural selection.
He proposed that organisms with better competitive advantage are more likely for be favored in nature.
- Charles Darwin was one of the scientist aboard the British HMS Beagle expenditure to the Galapagos Island.
- Darwin observed several plant and animal species on the Island.
- The study was in 1835.
- Although, a geologist but his works generally shifted by the rich biodiversity of the Island area.
Learn more:
Evolution brainly.com/question/6912833
#learnwithBrainly
Explanation:
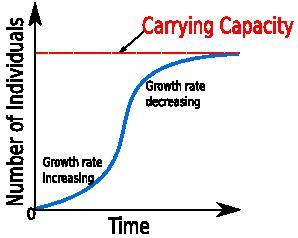
Carrying capacity refers to the maximum number of individuals of a certain species an environment can maintain in the long-term.
Factors that will determine carrying capacity include amount of water available in the environment, geographic size of environment, energy sources available, and so forth.
The image below shows the general idea of carrying capacity and population size:
The reality is often not so simple, as populations can overshoot their carrying capacity. When this happens, it takes some time for the population numbers to decrease. Thus, graphs more realistically resemble the one below:
Over time and with no disturbances, the population will generally max out at the carrying capacity. It is also important to remember that environments may not be unchanging, especially in certain time scales. For example, an increase in rainfall one year may mean that there is far more standing water available in the environment. Thus, mosquito populations will temporarily increase as the carrying capacity for them allows for higher numbers.
Answer:
Closed system.
Explanation:
Robot is an closed system because there is no transfer of mass but transfer of energy occurs from robot to its surrounding. According to the definition of closed system, closed system is a type of system in which there is only transfer of energy occurs while in open system both mass and energy can be transferred from the system to their surrounding. So no mass transferred from the robot only energy in the form of mechanical energy is transferred.