Answer:
Press Caps Lock key to see the light illuminates or not
Explanation:
Computer keyboard is the typewriter-style device that uses arrangement of the buttons or the keys to act as the mechanical levers or the electronic switches.
Keyboard keys have characters which are engraved or printed on the surface and press of each key corresponds to the single written symbol.
If the keyboard is not working and to see whether it is working or not, there is a Caps Lock key on the keyboard. Generally, all keyboards have a Caps Lock light which will light up if the button is on. So, this can be a quick check.
Click options in the tools menu and select track changers
Answer:
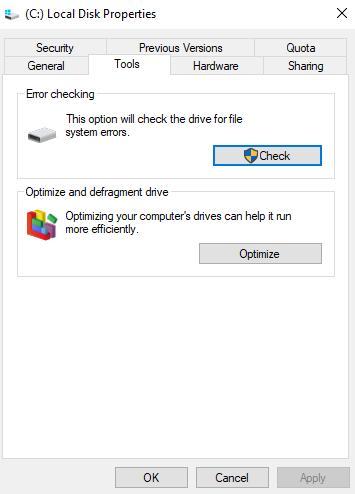
Check button under error checking
Explanation:
Under the Tools tab there are two options:
Error checking and Optimize and defragment drive option.
clicking the check button with administrative permission under error checking option will examine the hard drive for errors.
Answer:
Data is a piece of an Information or a raw form of information while an Information is a processed Data.
Explanation:
An example of Data would be Alphabets of someone's name while the name would be an example of an Information.
On it's own, data makes no sense and needs to be processed to become Information which makes sense.
Answer:
Brainly gives special ranks to users who give outstanding performance in a specific subject. These ranks are known as Wizard rank. Specifically for only one person in each subjects: Maths, Chemistry, Physics, Biology, and English.
Explanation: