It depends on your database system, but most of the database system, you had to do the indexes for it and then conduct a query by ID or something else.
Answer:
c
Explanation:
Reports communicate information which has been compiled as a result of research and analysis of data and of issues
Answer:D) Hardware failure
Explanation: Fatal error are those which stops the function execution of the operating system during the run-time in the Microsoft Windows . These errors. These errors are seen the Microsoft windows due to the major reason of the hardware failure, accessing of the invalid code,operating system files might get corrupted etc. Therefore, the correct option is option(D).
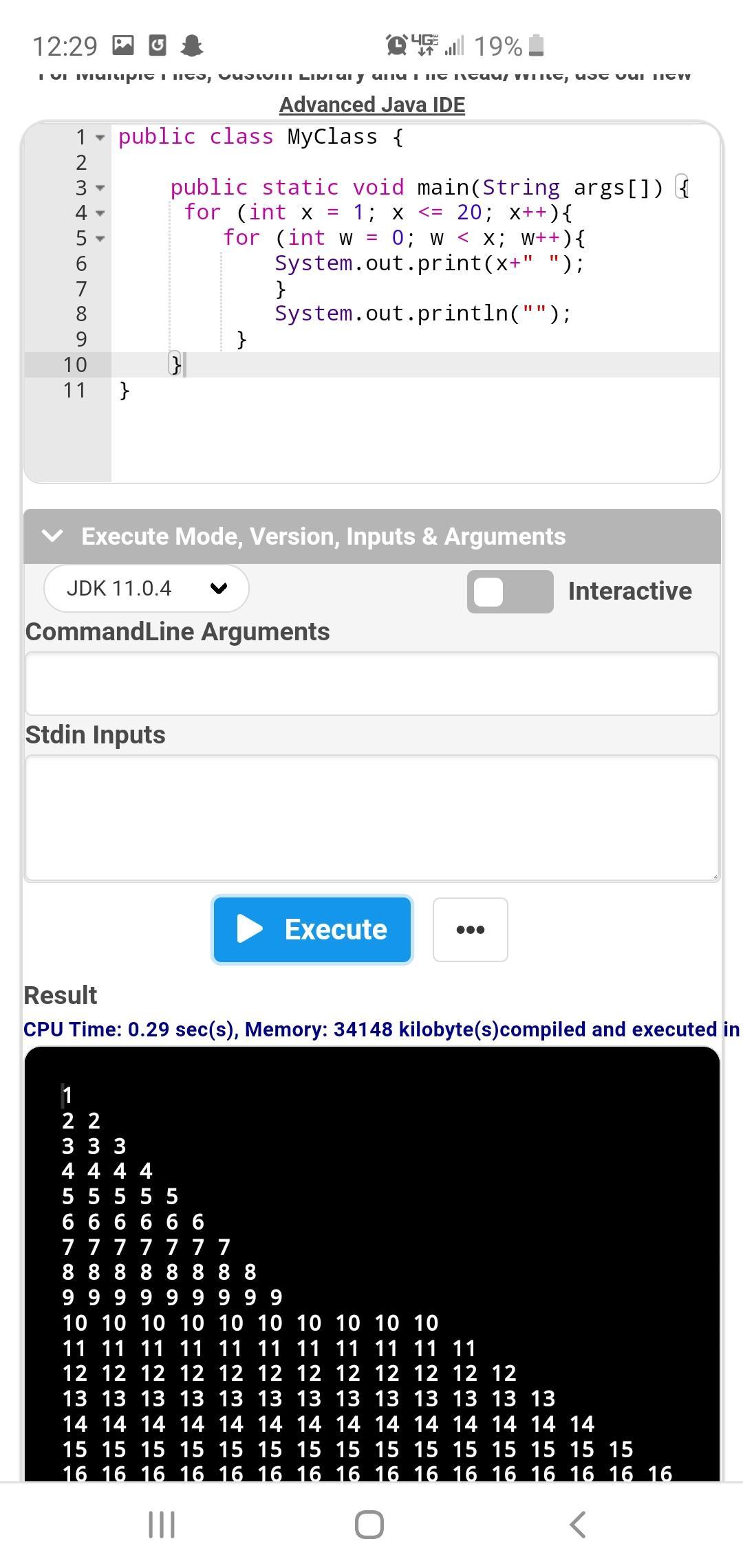
I've included my code in the picture below. Best of luck.
Answer:
static int [] bubbleSort(int[] arr) {
int n = arr.length;
int temp = 0;
for(int i=0; i < n; i++){
for(int j=1; j < (n-i); j++){
if(arr[j-1] > arr[j]){
temp = arr[j-1];
arr[j-1] = arr[j];
arr[j] = temp;
}
}
}
return arr;
}
Explanation:
Above function is written in java language in which it takes integer array then sorts it using bubble sort and return back the array. The function has return type int[] which is necessary for returning array of type integer. The variable n contains the size of array which is calculated through array's length method which is built in. Above function sorts array in descending order if you want to sort it in ascending order just change the condition of in if branch from <em>"</em><em>if(</em><em>arr[j-1] > arr[j]</em><em>)</em><em>"</em> to <em>"</em><em>if(</em><em>arr[j-1] < arr[j]</em><em>)</em><em>"</em> means replace > sign with < sign .