Answer:
Here is the JAVA program:
import java.util.Scanner; // for taking input from user
//class to count number of times a character appears in the string
public class CharacterCounter
//method which returns number of times a character appear in string
{ public static int CountCharacter(String userString, char character)
{
int counter = 0; //stores the no of times character appears in string
for (int i=0; i<userString.length(); i++) //loop moves through entire string
{ // if character matches the character in the string
if (userString.charAt(i) == character)
counter++; // adds one to the character counter variable
}
return counter; } // returns no of time character is found in string
public static void main(String[] args) {
Scanner scanner = new Scanner(System. in);//takes input from user
String string;
char character;
System.out.println("Enter a string"); //prompts user to enter a string
string = scanner.nextLine(); //scans the input string
System.out.println("Enter a character");
// prompts user to enter character
character = scanner.next().charAt(0); //scans and reads the character
System.out.println("number of times character "+character + " appears in the string " + string +": " + CountCharacter(string, character)); } }
// calls CountCharacter method to output no of times a character appears in the input string
Explanation:
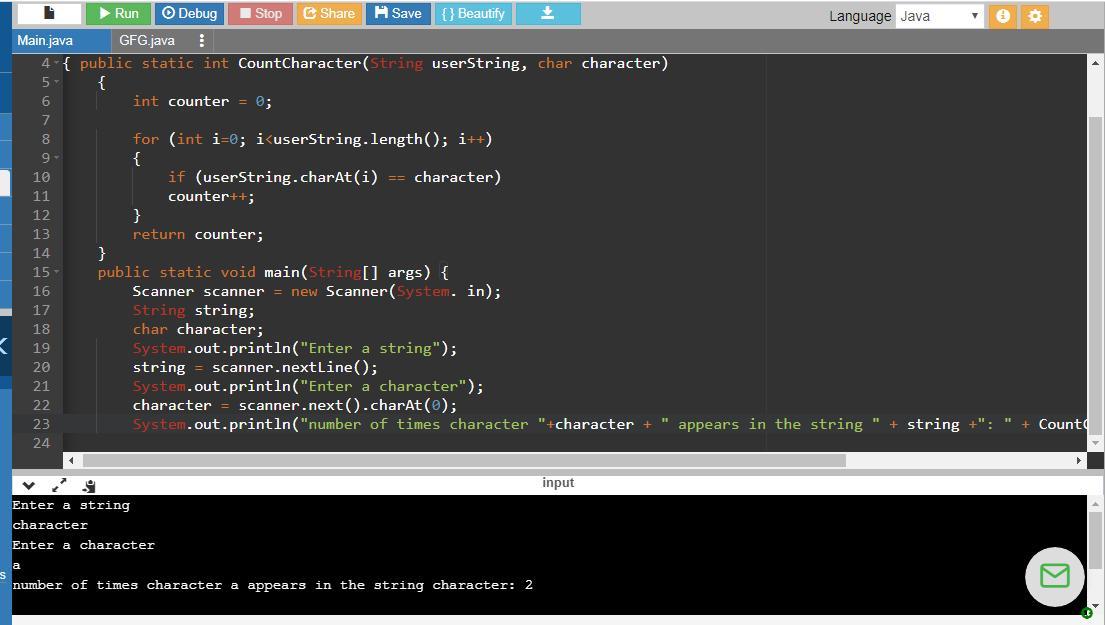
The method CountCharacter() has a loop in which the variable i works as an index which moves through each character of the string and if the character of the string in i matches the character which is to be found in the string then the value of counter variable increments by 1. This means that counter variable keeps counting the number of time the character appears in the string. The loop breaks when value of i exceeds the length of the string which means that the i reaches the end of the string and has searched the entire string for the specified character. In the end the count variable returns the number of time character appeared in the string. The main() function takes as input from the user, a string and a character to be searched for in the string. It then calls CountCharacter() function to find the number of times that input character appears in the input string and displays it on the output screen.
The program along with its output is attached as a screenshot.