Answer:
This is not possible with 2 equal symbols
Answer:
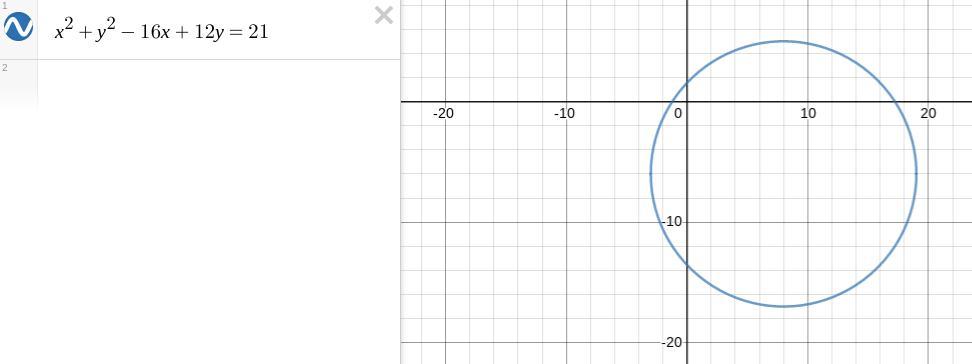
The diameter of the circle is 22 units.
Step-by-step explanation:
x² + y² - 16x + 12y = 21 I graphed this equation on the graph below.
If this answer is correct, please make me Brainliest!
Answer:
(11.242 ; 12.958)
Step-by-step explanation:
The confidence interval is obtained using the relation :
C. I = xbar ± Zcritical * s/√n
Given that ::
xbar = 12.1 ;
Standard deviation, s = 16.6
n = 1012
C. I = 12.1 ± 1.645 * (16.6/√1012)
C.I = 12.1 ± 0.8583881
C. I = 11.242 ; 12.958
Answer:
Lower and Upper Class Limit
Step-by-step explanation:
The Lower class limit is the smallest value within the class and the Upper class limit is the largest value within the class.
In a grouped data, data are distributed into classes with a specific class size/interval. e.g. The Class 0-4 has a Class Size of 5. The Lower class limit in this case is 0 and the Upper Class Limit is 4.
Answer: 20 eggs
Step-by-step explanation:
The rate is 5. 25/5=5.
4*5=20
Hope this helps!