Answer:
2400
Step-by-step explanation:
Step 1: Turn 0.5 into a whole number.
Step 2: Divide 12 by 5.
Step 3: Multiply 2.4 by 1000
Therefore, the answer is 2400.
Have a lovely rest of your day/night, and good luck with your assignments! ♡
Answer:
top angle = 59
n= 12
submitted with n and you will get each angle
- - - - - - - - -
X = 32°
C= 67°
I don’t know what your asking
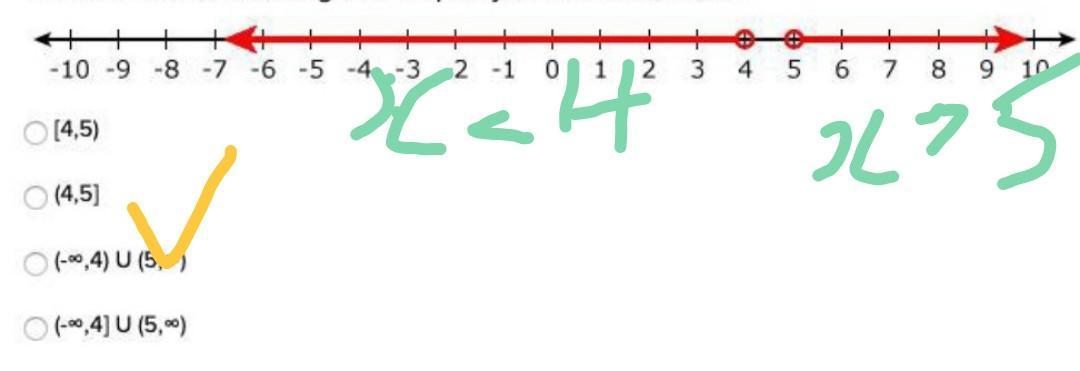
Answer:

Step-by-step explanation:
From the number line, the solution to the inequality is x<4 or x>5.
We can write x<4 in interval notation as (-∞,4) and x>5 as (5,∞).
The "or" represents the union of the two intervals.
Therefore the solution to the given inequality in interval notation is:
The third choice is the correct answer.
Solution of the equation: 
Step-by-step explanation:
The equation that we have to solve in this problem is:

The first step to do is to rewrite the mixed fractions as improper fractions. We have:

And

So the equation becomes

Now we multiply by 4 each term on both sides, and we get

Now we subtract 29 from both sides,

And finally, we divide both sides by 4:

Learn more about equations:
brainly.com/question/11306893
brainly.com/question/10387593
#LearnwithBrainly