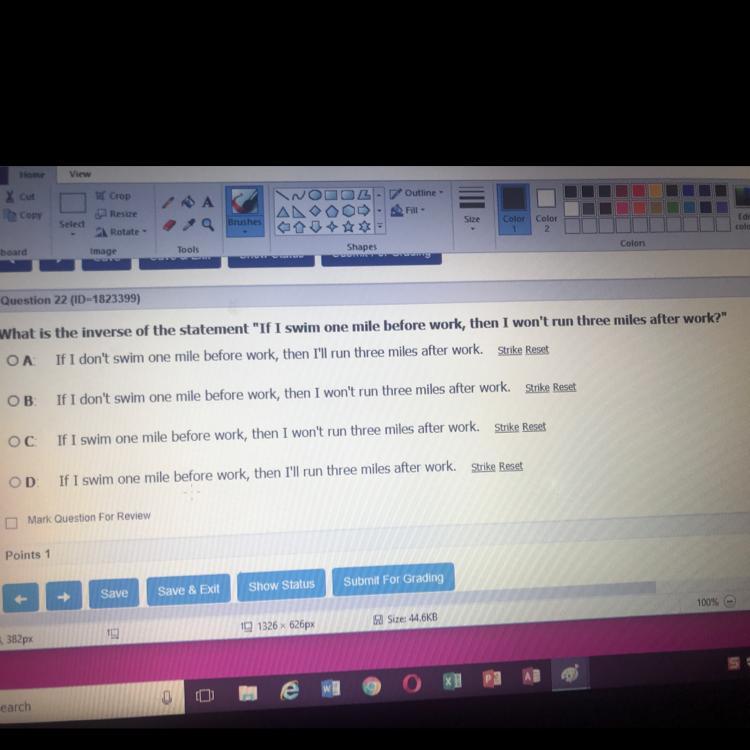
The answer is A "If I dont swim one mile before work, then I will run three miles after work"
Step-by-step explanation:
Since the double negation of any statement is equivalent to the original in classical logic, the inverse of the inverse is logically equivalent to the original conditional . Thus it is permissible to say that and are inverses of each other. Likewise, and are inverses of each other. So the opposite of what they are saying. Like If it rains the grass will get wet. Inverse- If it does not rain the grass will not get wet.
Since the proportions are different, it's best to say that to determine the price of a 40-pound bag, proportional reasoning is no where to be found so no, proportional reasoning cannot be used to find the price of a 40-pound bag!