To find miles per hour:
3 3/5 miles divided by 4/5 hour
3 3/5 = 5*3 + 3 = 18/5
18/5 divided by 4/5 equals
18/5 times 5/4
The fives cancel out, and we have 18/4 which reduces to 9/2 or 4 1/2 miles per hour :)
Answer: the "first" 1 is right
Step-by-step explanation:
Answer:
x=
Step-by-step explanation:
Answer:
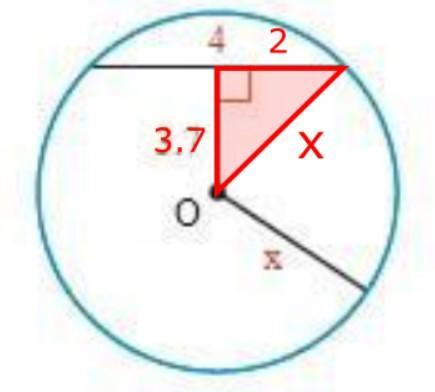
x ≈ 4.2 (nearest tenth)
Step-by-step explanation:
The chord of length 4 is the base of an isosceles triangle with height of 3.7 and sides equal to the radius (x).
An isosceles triangle comprises two right triangles, each with:
- base = 2 units
- height = 3.7 units
- hypotenuse = x units
Therefore, to find x use Pythagoras' Theorem: a² + b² = c²
(where a and b are the legs, and c is the hypotenuse, of a right triangle)
⇒ a² + b² = c²
⇒ 2² + 3.7² = x²
⇒ x² = 17.69
⇒ x = √(17.69)
⇒ x = 4.2 (nearest tenth)