Assume P(xp,yp), A(xa,ya), etc. We know that rotation rule of 90<span>° clockwise about the origin is R_-90(x,y) -> (y,-x) For example, rotating A about the origin 90</span><span>° clockwise is (xa,ya) -> (ya, -xa) or for a point at H(5,2), after rotation, H'(2,-5), etc.
To rotate about P, we need to translate the point to the origin, rotate, then translate back. The rule for translation is T_(dx,dy) (x,y) -> (x+dx, y+dy)
So with the translation set at the coordinates of P, and combining the rotation with the translations, the complete rule is: T_(xp,yp) R_(-90) T_(-xp,-yp) (x,y) -> </span>T_(xp,yp) R_(-90) (x-xp, y-yp) -> T_(xp,yp) (y-yp, -(x-xp)) -> (y-yp+xp, -x+xp+yp)
Example: rotate point A(7,3) about point P(4,2) => x=7, y=3, xp=4, yp=2 => A'(3-2+4, -7+4+2) => A'(5,-1)
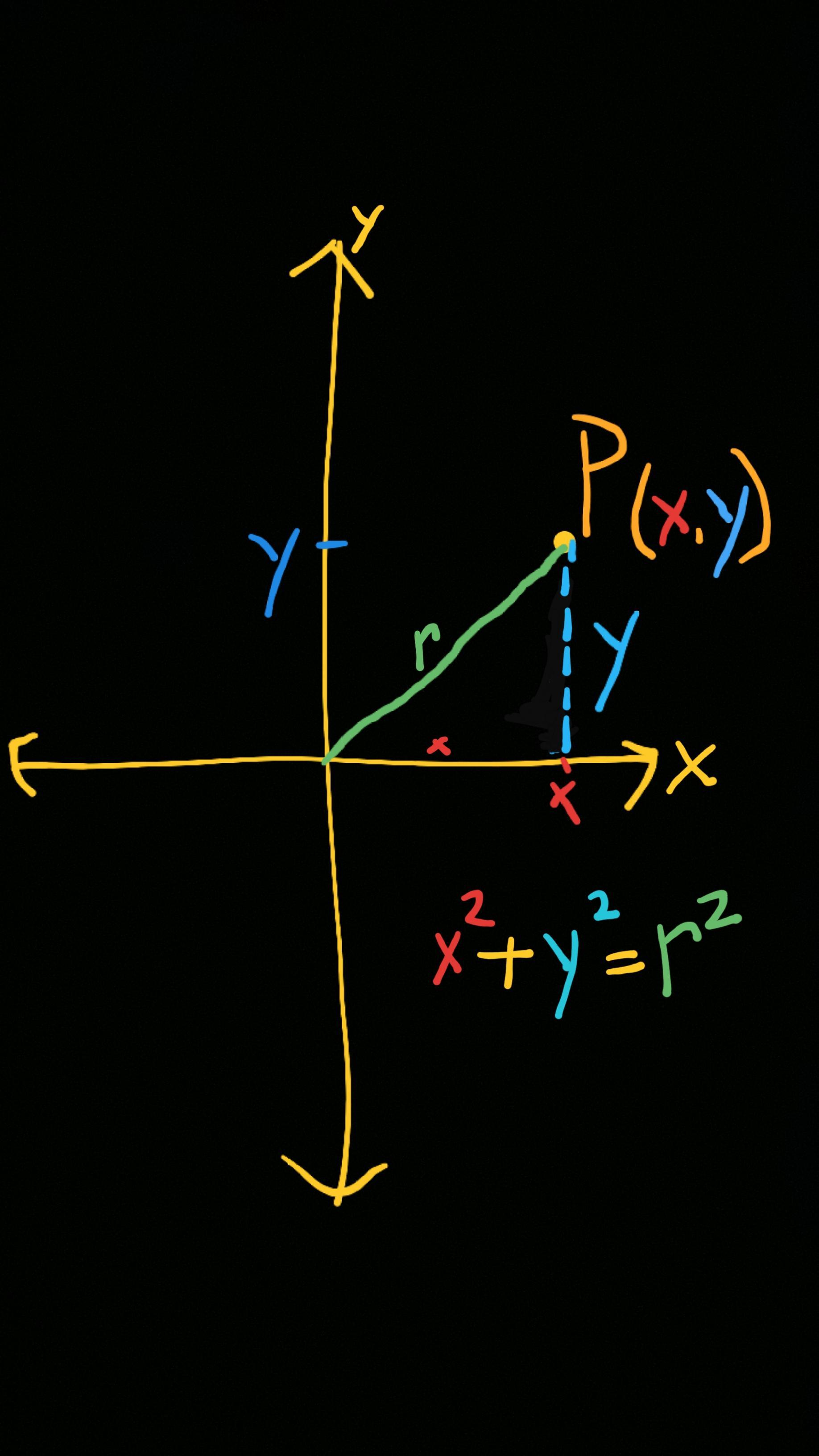
See image. "An angle in standard position" means the vertex (point part) of the angle is at the origin (0,0). And one side of the angle is glued onto the x-axis. The other side of the angle is free to rotate around the axis. That's the terminal side. Then there's a point P (x,y) on that side. See image. And r is labelled there. This set up makes a right triangle. So I put Pythagorean theorem as the answer here, but honestly if you are learning any right triangle theorems or trigonometry, you could use this set up. The leg that lays along the x-axis is x units long and the other leg is y units long. The hypotenuse is r units long.