Answer:
8%
Step-by-step explanation:
70.20−65.00=5.20
(5.20/65.00)×100=8
Answer:
9/10
Step-by-step explanation:
Answer:
See Below.
Step-by-step explanation:
Problem 1)
We want to simplify:

First, let's factor the denominators of each term. For the second term, we can use the difference of two squares. Hence:

Now, create a common denominator. To do this, we can multiply the first term by (<em>a</em> + 1) and the second term by (<em>a</em> + 2). Hence:

Add the fractions:

Factor:

Simplify:

We can expand. Therefore:

Problem 2)
We want to simplify:

Again, let's create a common denominator. First, let's factor out a negative from the second term:

Now to create a common denominator, we can multiply the first term by (<em>a</em> - <em>c</em>) and the second term by (<em>a</em> - <em>b</em>). Hence:

Subtract the fractions:

Distribute and simplify:

Cancel. Hence:

Answer is .47
Fourty seven hundredths in standard form is .47,
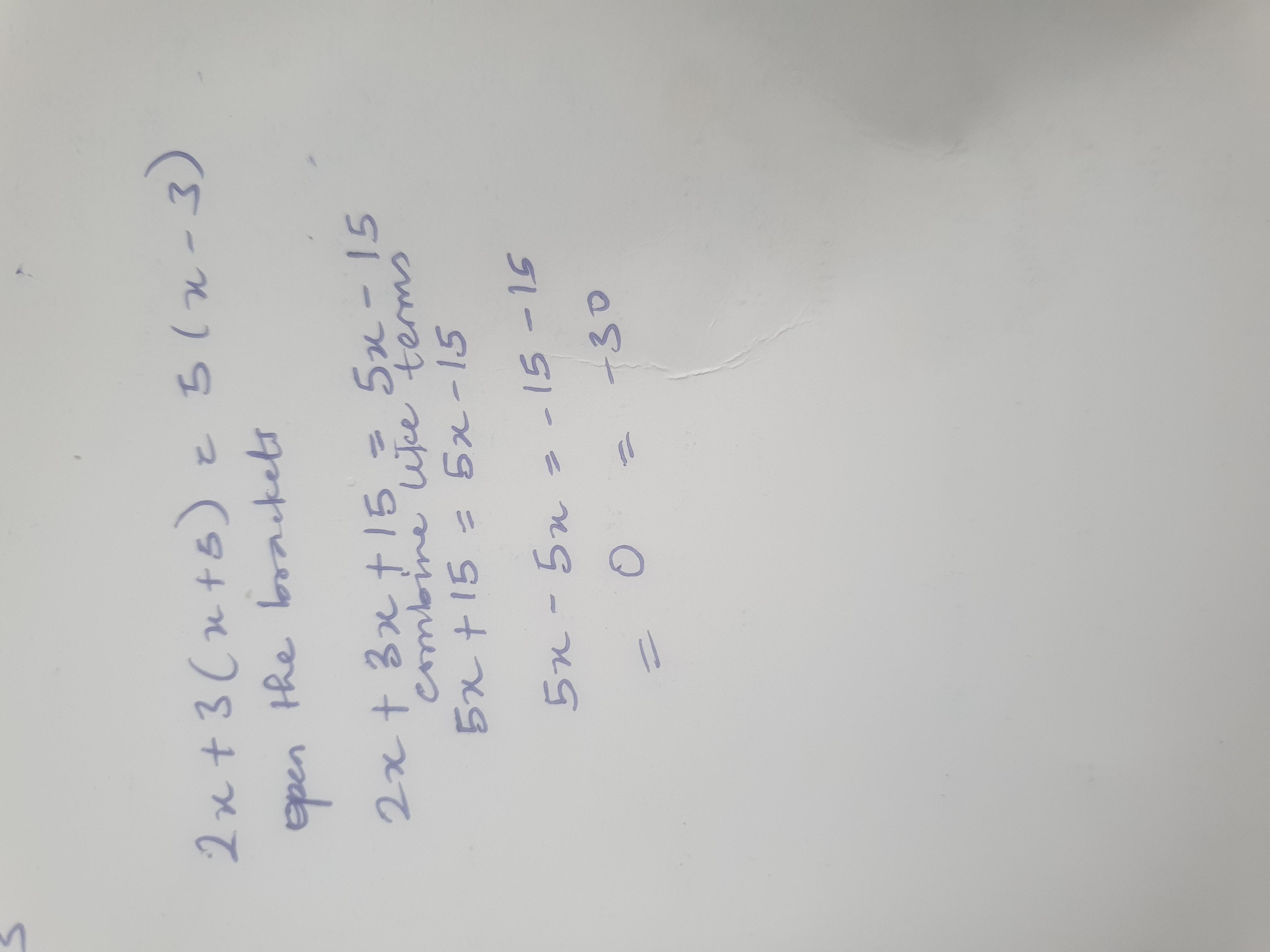
Answer: no solution
Step-by-step explanation:
Attached