Answer:
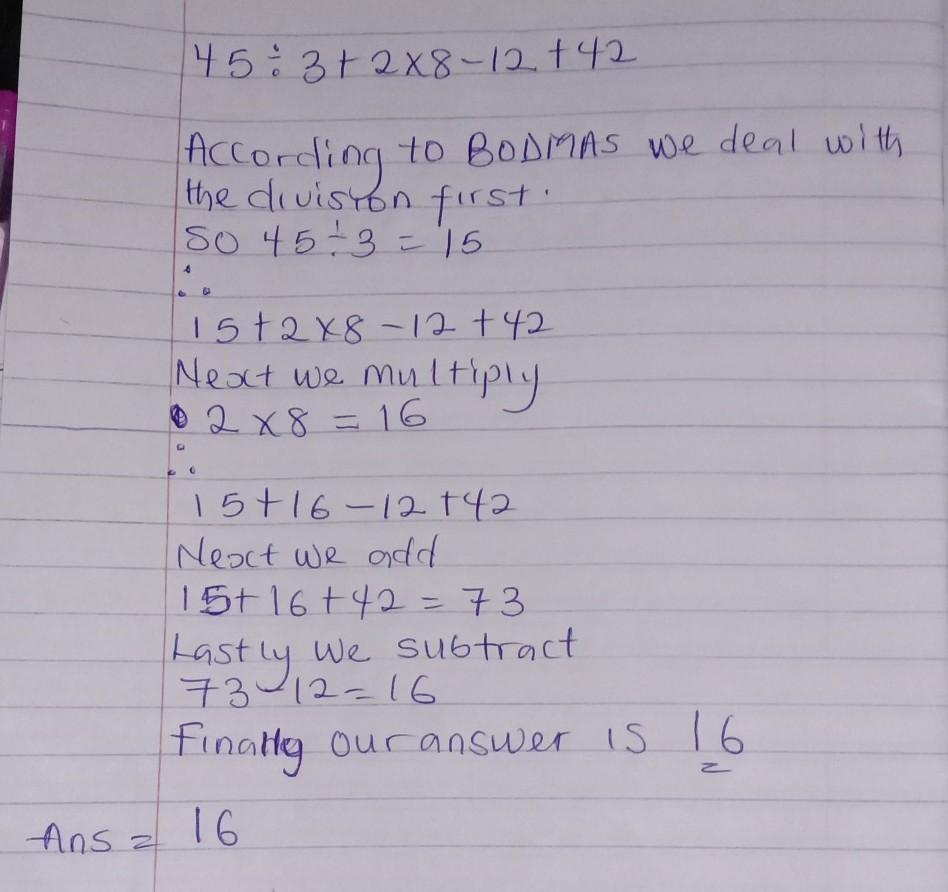
Explanation is in the picture and the answer is 16
Answer:
The temperature of the water increases because the nuclear reactor heats it producing steam
Explanation:
The nuclear power plants are usually defined as those thermal plants where the nuclear reactors are used in order to generate heat that eventually leads to the rotating of the turbines and produces electricity. Here the nuclear reactor heats the water, and it increases above a temperature of 100°C, where this heat energy plays a key role in the entire process. It is an efficient method as it does not lead to the emission of any green house gases that are harmful to the environment.
Yeah yeah I just got a hold of you and I saw that you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job and I thought you were doing a good job.
Answer:

<em>The potential environmental impacts associated with solar power—land use and habitat loss, water use, and the use of hazardous materials in manufacturing—can vary greatly depending on the technology, which includes two broad categories: photovoltaic (PV) solar cells or concentrating solar thermal plants (CSP).</em>
Explanation:
I just answer the second question