Answer:
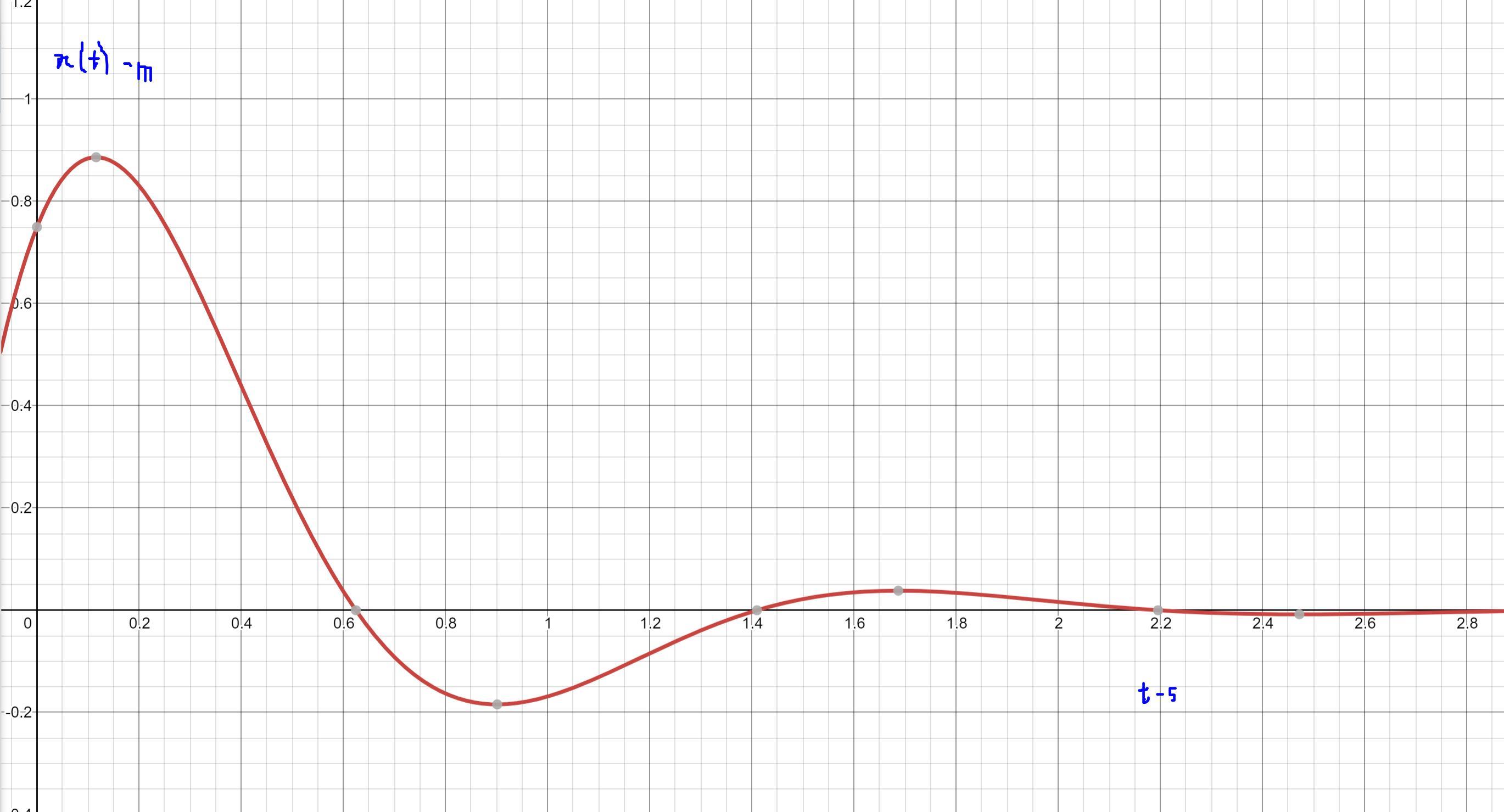
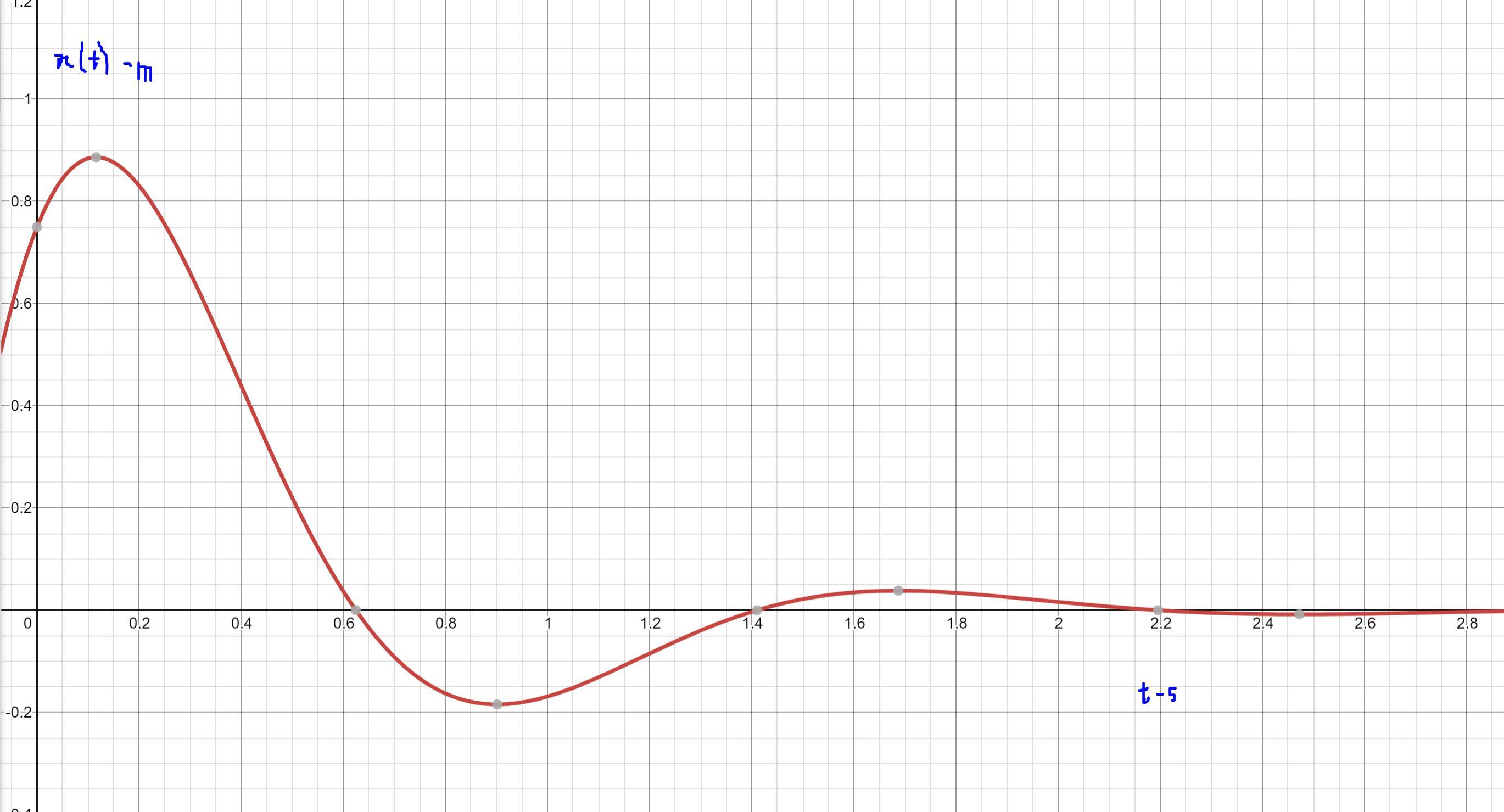
a) ![x(t) = e^(^-^2^t^)[ cos ( 4t ) + 0.75*sin ( 4t ) ]](https://tex.z-dn.net/?f=x%28t%29%20%3D%20e%5E%28%5E-%5E2%5Et%5E%29%5B%20cos%20%28%204t%20%29%20%2B%200.75%2Asin%20%28%204t%20%29%20%5D)
b) 
c) t = ( 0.7957*k - 0.160875 )s with k = 0, 1 , 2 , 3 , ....
Explanation:
Declaring variables:-
- The mass = m
- Positive damping constant = β
- Spring constant = k
- Gravitational constant, g = 32.2 ft/s^2
Given:-
- The attached initial weight, Wi = 10 lbs
- The attached second weight, Wf = 8 lbs
- Length of un-extended spring, Li = 5 ft
- The extended length, Lf = 7 ft
Find:-
(a) Find the equation of motion if the mass is initially released from a point foot below the equilibrium position with a downward velocity of 1 ft/s.
(b) Express the equation of motion in the form given in (23)
(c) Find the times at which the mass passes through the equilibrium position heading dow
Solution:-
- We will first evaluate the constants m , k and β using conditions given:
m = Wf / g
m = 8 / 32 = 0.25 slugs.
- We will use the equilibrium condition in (vertical direction) on the spring when the weight of Wi = 10 lbs was attached onto the spring. The spring restoring force (Fs) acts up while weight attached combats it by pointing downward.
Fs - Wi = 0
- From Hooke's Law we have:
Fs = Wi = k*ΔL ....... ΔL : Extension of spring
k = W / ΔL = W / ( Lf - Li )
k = 10 / ( 7 - 5 )
k = 5 lb/ft
- Since we have insufficient information about the damping constant of the medium we will assume it as unit. β = 1.
- Now, we will consider the dynamic motion of the spring attached with mass with weight Wf damped in a medium with constant β. We will use Newton's second equation of motion for the spring.
F_net = m*a
Where, F_net : Net force acting on the attached mass
a : Acceleration of the block
- There are two forces acting on the spring ( Damping force - D and restoring force of spring (ks) ). We will consider a displacement of mass in vertical direction as (x).
- D - Fs = m*a
- Using hooke's law and damping force (D) is proportional to velocity of attached mass. We have:
- β*dx/dt - k*x = m*( d^2 x / dt^2)
- Plug in the constants:

- Now solve the derived ODE. The Auxiliary equation for the above ODE is:
s^2 + 4s + 20 = 0
- Solve the quadratic and evaluate roots.
s = -2 +/- 4i ....... (Complex Roots)
- The complementary solution (yc) for complex roots of the auxiliary is:
![xc (t) = e^(^-^2^t^)[ A*cos ( 4t ) + B*sin ( 4t ) ]](https://tex.z-dn.net/?f=xc%20%28t%29%20%3D%20e%5E%28%5E-%5E2%5Et%5E%29%5B%20A%2Acos%20%28%204t%20%29%20%2B%20B%2Asin%20%28%204t%20%29%20%5D)
- Use the given initial conditions and evaluate constants A and B :
x ( 0 ) = 1 ft , x ' (0) = 1 ft/s
![xc (0) = e^(^0^)[ A*cos ( 0 ) + B*sin ( 0 ) ] = 1* [ A + 0 ] = 1\\\\A = 1\\\\xc'(t) = -2*e^(^-^2^t^)[ A*cos ( 4t ) + B*sin ( 4t ) ] + e^(^-^2^t^)[ -4A*sin ( 4t ) + 4B*cos ( 4t ) ]\\\\xc'(0) = -2*e^(^0^)[ cos ( 0 ) + B*sin ( 0 ) ] + e^(^0^)[ -4sin ( 0 ) + 4B*cos ( 0 ) ]\\\\ 1 = -2*[ 1 + 0 ] + 1*[ 0 + 4B]\\\\B = 3 / 4 = 0.75](https://tex.z-dn.net/?f=xc%20%280%29%20%3D%20e%5E%28%5E0%5E%29%5B%20A%2Acos%20%28%200%20%29%20%2B%20B%2Asin%20%28%200%20%29%20%5D%20%3D%201%2A%20%5B%20A%20%2B%200%20%5D%20%3D%201%5C%5C%5C%5CA%20%3D%201%5C%5C%5C%5Cxc%27%28t%29%20%3D%20-2%2Ae%5E%28%5E-%5E2%5Et%5E%29%5B%20A%2Acos%20%28%204t%20%29%20%2B%20B%2Asin%20%28%204t%20%29%20%5D%20%2B%20e%5E%28%5E-%5E2%5Et%5E%29%5B%20-4A%2Asin%20%28%204t%20%29%20%2B%204B%2Acos%20%28%204t%20%29%20%5D%5C%5C%5C%5Cxc%27%280%29%20%3D%20-2%2Ae%5E%28%5E0%5E%29%5B%20cos%20%28%200%20%29%20%2B%20B%2Asin%20%28%200%20%29%20%5D%20%2B%20e%5E%28%5E0%5E%29%5B%20-4sin%20%28%200%20%29%20%2B%204B%2Acos%20%28%200%20%29%20%5D%5C%5C%5C%5C%201%20%3D%20-2%2A%5B%201%20%2B%200%20%5D%20%2B%201%2A%5B%200%20%2B%204B%5D%5C%5C%5C%5CB%20%3D%203%20%2F%204%20%3D%200.75)
- The complementary solution becomes:
![xc (t) = e^(^-^2^t^)[ cos ( 4t ) + 0.75*sin ( 4t ) ]](https://tex.z-dn.net/?f=xc%20%28t%29%20%3D%20e%5E%28%5E-%5E2%5Et%5E%29%5B%20cos%20%28%204t%20%29%20%2B%200.75%2Asin%20%28%204t%20%29%20%5D)
- Since there is no excitation force acting on the system( Homogenous ). The particular solution does not exist and the general solution to equation of motion is:
- An alternative form of the displacement (x) - Time (t) motion is:

Where,
P = √ ( A^2 + B^2) .... Amplitude
theta (θ) = arctan ( B / A )
Auxiliary roots = ( a +/- bi) ..... a = -2 , b = 4
wd = w*√ 1 - ρ^2 = w = b = 4 .......... (β = 1 => ρ = 0)
- Evaluate P and theta (θ):
P = √ ( 1^2 + 0.75^2) = 1.25 m
theta (θ) = arctan ( 3 / 4 ) = 0.64350 rads
- The alternative form of Equation (23) is:
c)
- To determine the range of times (t) when the mass passes the the equilibrium position can be evaluated by setting x(t) form (23) equal to 0.

- The domain for time (t) is as follows:
t = ( 0.7957*k - 0.160875 )s with k = 0, 1 , 2 , 3 , ....