Answer:
s= 6.53 m
t=3.27 s
Explanation:
velocity = 6 m/s
deceleration = -1.5

now inserting value of v=6s we get distance(s)
s= 6.53 m ( distance cannot be negative)
now for time calculation we know that


putting value of v=6s
t=3.27 s (time cannot be negative)
Answer:
1) Angle with x-axis = 42.03 degrees
2) Angle with y-axis =68.2 degrees
3) Angle with z-axis = 56.14 degrees
Explanation:
given any vector 
and any x axis the angle between them is given by

Applying values we get

Angle between the vector and y axis is given by

Applying values we get

Similarly angle between z axis and the vector is given by

Applying values we get

Answer:
yes
Explanation:
The 1991 standard states, "engineering and work practice controls shall be used to eliminate or minimize employee exposure." The revision defines Engineering Controls as "controls (e.g., sharps disposal containers, self-sheathing needles, safer medical devices, such as sharps with engineered sharps injury protections ...
Answer:
The code is in the Explanation
Explanation:
#include <iostream>
using namespace std;
int main() {
int xValNew = 0;
int yValNew = 0;
CoordTransform(3, 4, xValNew, yValNew);
cout << "(3, 4) becomes " << "(" << xValNew << ", " << yValNew << ")" << endl;
return 0;}
Answer:
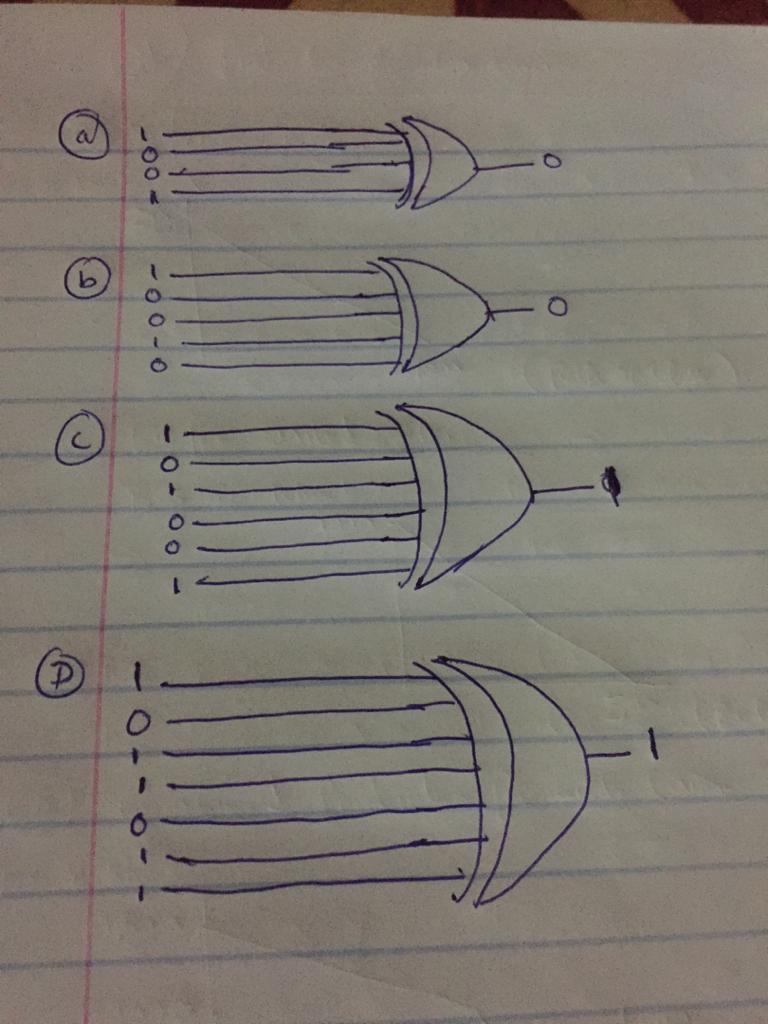
a) 4-input XOR, input data-1001 = 0 Even parity Bit
b) 5-input XOR, input data-10010 = 0 Even parity Bit
c) 6-input XOR, input data-101001 = 1 Even parity Bit
d) 7-input XOR, input data 1011011 = 1 Even parity Bit
Explanation:
a) 4-input XOR, input data-1001 ; generates 0 Even parity Bit
b) 5-input XOR, input data-10010 ; generates 0 Even parity Bit
c) 6-input XOR, input data-101001 ; generates 1 Even parity Bit
d) 7-input XOR, input data 1011011 ; generates 1 Even parity Bit
Attached below is the Logic circuits of the data inputs