ANSWER:
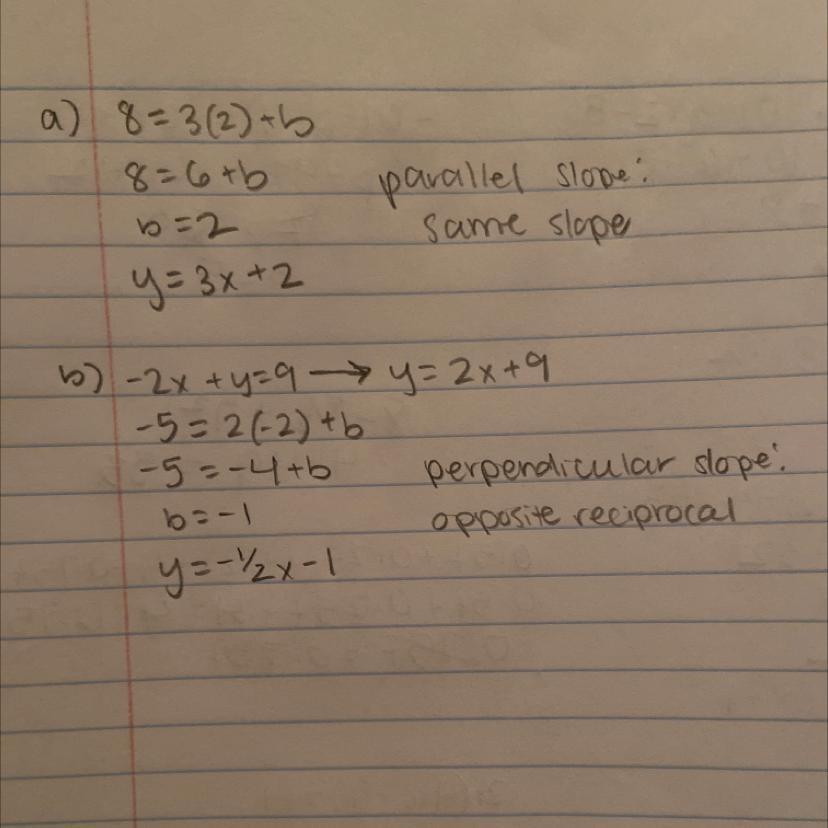
a. y=3x+2
b. y=-1/2x-1
find the y intercepts that fit with the coordinates and for a parallel line the slope stays the same, while for a perpendicular line the slope flips and turns into the opposite symbol.
The life span of the battery can be expected 98% of the batteries to meet the guarantee will be 149.3 hours.
<h3>What is the z-score?</h3>
The z-score is a statistical evaluation of a value's correlation to the mean of a collection of values, expressed in terms of standard deviation.
The z-score is given as
z = (x - μ) / σ
Where μ is the mean, σ is the standard deviation, and x is the sample.
Many electronic devices use disposable batteries, which eventually have to be replaced.
The mean is 140 hours and the standard deviation is 4 hours.
The marketing department wants to write a guarantee for the battery life.
The life span of the battery can be expected 98% of the batteries to meet the guarantee will be
Then the z value for 98% is 2.326.
Then the life span will be
2.326 = (x - 140) / 4
9.304 = x - 140
x = 149.3 hours
The life span of the battery can be expected 98% of the batteries to meet the guarantee will be 149.3 hours.
More about the z-score link is given below.
brainly.com/question/15016913
#SPJ1
2/3
denominator is increased by a number so 3+a
numerator is doubled so 2(2)= 4
in order for it to be a whole (or 1) then it would have to be 4/4
so 4-3=1
the number is 1
Answer:
only if the denominator(the number you're going to divide it with) is negative for example : 5÷-3. Note : it only works in division!!!!!!!!!
Answer:
dont click the link!!
Step-by-step explanation: