Answer:

Explanation:
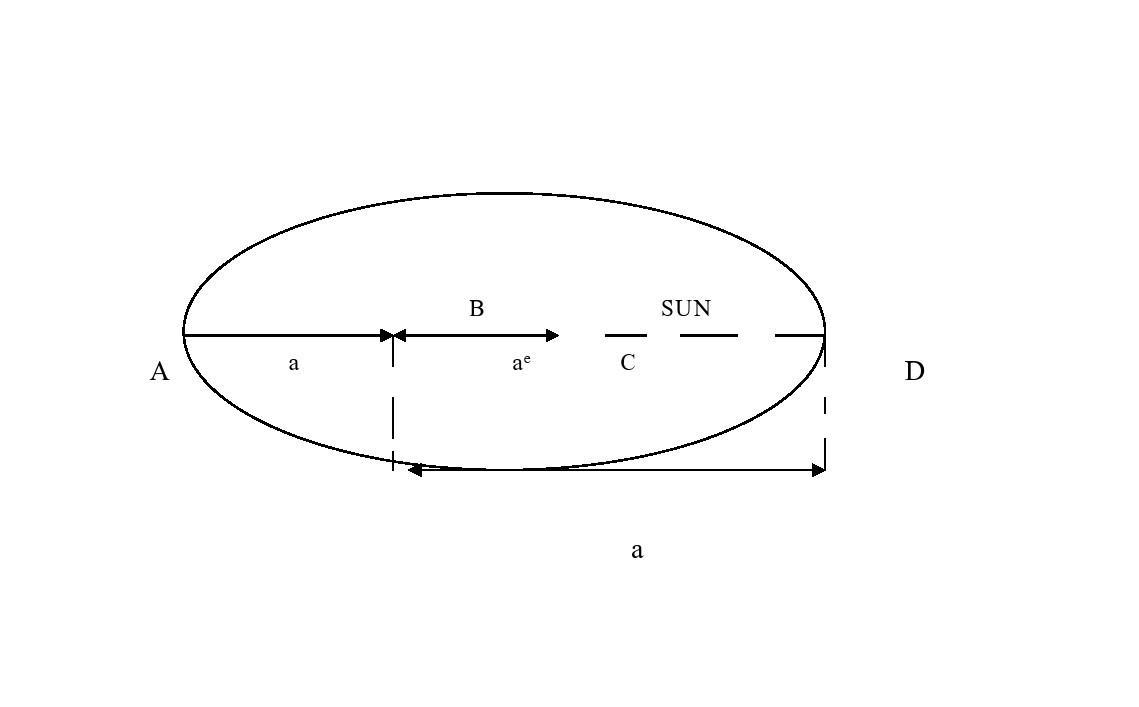
From the attached diagram below:
AC = a (1 + e) = R₂ -------- equation (1)
CD = a ( 1 - e) = R₁ --------- equation (2)
⇒ 1 - e = 

Replacing the value for e into equation (1)



From Kepler's third law;


F=-ks
F=-(390)(.45)
F=-175.5 N
Work=force x displacement
Work= 175.5(0.45)
Work= 78.98 J
Work = ∆E =78.98 J
Answer=79J (first option)
Answer:
0
Explanation:
the block is being pulled at a constant velocity meaning it has no acceleration. the rule is fnet=mass x acceleration so if theres no acceleration there is no force net!