I’m pretty sure it’s kinetic energy
Answer:
Fc=5253
N
Explanation:
Answer:
Fc=5253
N
Explanation:
sequel to the question given, this question would have taken precedence:
"The 86.0 kg pilot does not want the centripetal acceleration to exceed 6.23 times free-fall acceleration. a) Find the minimum radius of the plane’s path. Answer in units of m."
so we derive centripetal acceleration first
ac (centripetal acceleration) = v^2/r
make r the subject of the equation
r= v^2/ac
ac is 6.23*g which is 9.81
v is 101m/s
substituing the parameters into the equation, to get the radius
(101^2)/(6.23*9.81) = 167m
Now for part
( b) there are two forces namely, the centripetal and the weight of the pilot, but the seat is exerting the same force back due to newtons third law.
he net force that maintains circular motion exerted on the pilot by the seat belts, the friction against the seat, and so forth is the centripetal force.
Fc (Centripetal Force) = m*v^2/r
So (86kg* 101^2)/(167) =
Fc=5253
N
Which questions? i need to see the actual question, did you like upload them to your profile now?
Answer:14 s
Explanation:
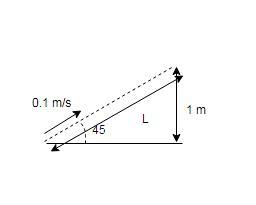
Given
Velocity of ant is 0.1 m/s in a direction 
if it has traveled 1 m perpendicular to the edge of the sidewalk
i.e. from diagram