Complete Question
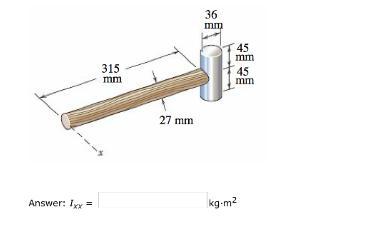
Diagram for this shown on the first uploaded image
Answer:
The moment of inertia Ixx of the mallet about the x-axis is 
Explanation:
From the question we are told that
The density `of wooden handle is 
The density `of soft-metal head is 
Generally the mass of the wooden can be mathematically obtained with this formula

Where  is mass of wooden handle which is mathematically obtain with the formula
is mass of wooden handle which is mathematically obtain with the formula

Where  is the diameter of the wooden handle which from the diagram is
is the diameter of the wooden handle which from the diagram is

So 
 is the length of the the wooden handle which is given in the diagram as
is the length of the the wooden handle which is given in the diagram as 
Substituting these value into the formula for mass


Generally the mass of the soft-metal head can be mathematically obtained with this formula

Where  is mass of soft-metal head which is mathematically obtain with the formula
is mass of soft-metal head which is mathematically obtain with the formula

Where  is the diameter of the soft-metal head which from the diagram is
is the diameter of the soft-metal head which from the diagram is

So 
 is the length of the the soft-metal head which is given in the diagram
is the length of the the soft-metal head which is given in the diagram
as 
Substituting these value into the formula for mass


Generally the mass moment of inertia about x-axis for the wooden handle is
![(I_{xx})_w = [\frac{1}{3}m_w + l_w^2 ]](https://tex.z-dn.net/?f=%28I_%7Bxx%7D%29_w%20%20%3D%20%20%20%20%5B%5Cfrac%7B1%7D%7B3%7Dm_w%20%2B%20l_w%5E2%20%5D)
Substituting values
![(I_{xx})_w = [\frac{1}{3}*0.155 + 0.315^2 ]](https://tex.z-dn.net/?f=%28I_%7Bxx%7D%29_w%20%20%3D%20%20%20%20%5B%5Cfrac%7B1%7D%7B3%7D%2A0.155%20%2B%200.315%5E2%20%5D)

Generally the mass moment of inertia about x-axis for the soft-metal head is
![(I_{xx})_s = [\frac{1}{12}m_s l_s ^2 + b^2]](https://tex.z-dn.net/?f=%28I_%7Bxx%7D%29_s%20%3D%20%5B%5Cfrac%7B1%7D%7B12%7Dm_s%20l_s%20%5E2%20%2B%20b%5E2%5D)
Where b is the distance from the centroid to the axis of the head which is mathematically given as

Substituting values


Now substituting values into the formula for mass moment of inertia about x-axis for soft-metal head
![(I_{xx})_s = [\frac{1}{12} *0.733* 0.090^2 + 0.336^2]](https://tex.z-dn.net/?f=%28I_%7Bxx%7D%29_s%20%3D%20%5B%5Cfrac%7B1%7D%7B12%7D%20%2A0.733%2A%20%200.090%5E2%20%2B%200.336%5E2%5D)

Generally the mass moment of inertia about x-axis is mathematically represented as

![= [\frac{1}{3}m_w + l_w^2 ] + [\frac{1}{12}m_s l_s ^2 + b^2]](https://tex.z-dn.net/?f=%3D%20%5B%5Cfrac%7B1%7D%7B3%7Dm_w%20%2B%20l_w%5E2%20%5D%20%2B%20%5B%5Cfrac%7B1%7D%7B12%7Dm_s%20l_s%20%5E2%20%2B%20b%5E2%5D)
Substituting values