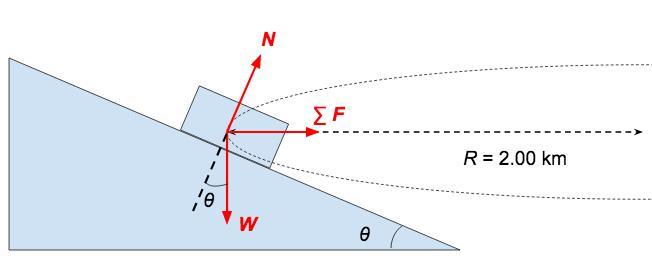
An "ideal" banking angle assumes no friction is required to keep a car on the road as it turns. Let <em>θ</em> denote the banking angle, and consult the attached free-body diagram for a car making the turn. There are only 2 relevant forces acting on the car,
• the normal force with magnitude <em>n</em>
• the car's weight with magnitude <em>w</em>
and the net force points toward the center of the circle made by the turn, with centripetal acceleration
<em>a</em> = (125 km/h)² / (2.00 km) = 7812.5 km/h² ≈ 0.603 m/s²
Split up the forces into components acting perpendicular (⟂) and parallel (//) to the banked curve, so that by Newton's second law,
∑ <em>F</em> (⟂) = <em>N</em> + <em>W</em> (⟂) = <em>m</em> <em>a</em> (⟂)
and
∑ <em>F</em> (//) = <em>W</em> (//) = <em>m a</em> (//)
Let the direction of <em>N</em> be the positive perpendicular axis, and down the incline and toward the center of the circle the positive parallel axis. The net force vector and acceleration both make an angle <em>θ</em> with the banked curve, and <em>W</em> makes the same angle with the negative perpendicular axis, so that the equations above reduce to
<em>N</em> - <em>m g</em> cos(<em>θ</em>) = <em>m</em> <em>a</em> sin(<em>θ</em>)
and
<em>m g</em> sin(<em>θ</em>) = <em>m a</em> cos(<em>θ</em>)
The second equation is all we need at this point to find the ideal <em>θ</em>. The mass <em>m</em> cancels out, and we can solve for <em>θ</em> to get
tan(<em>θ</em>) = <em>a</em>/<em>g</em> ≈ (0.603 m/s²) / (9.80 m/s²) ≈ 0.0615
→ <em>θ</em> ≈ 3.52°