Answer:
The answer is Friction.
Hope this helps :)
Please mark me brainliest :)
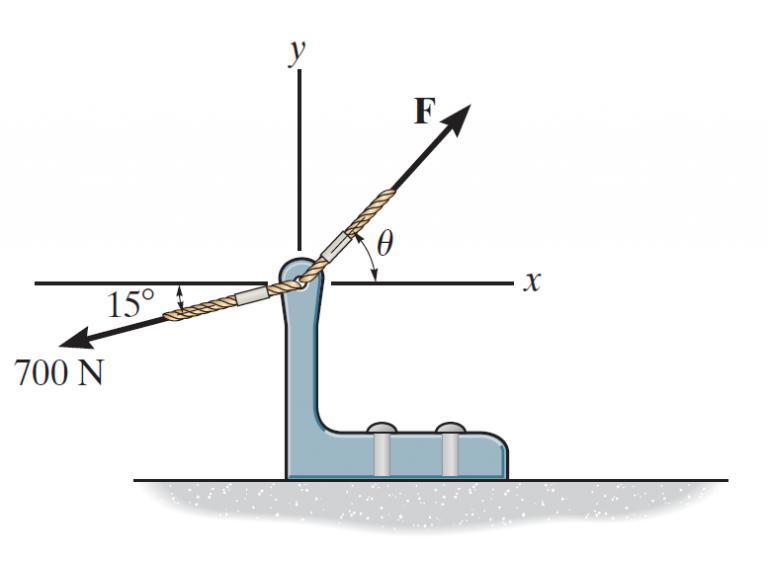
Answer: F = 776.18N θ = 29.41°
Question:
The magnitude of the resultant force is to be 200 N, directed along the positive y-axis. Determine the magnitude of the force F Find the angle θ.
Attached is the image.
Explanation:
To solve this question we need to resolve the forces to the x and y axis.
For the x axis;
Fcosθ = 700cos15....1
For the y axis;
200 = Fsinθ - 700sin15
Fsinθ = 200 + 700sin15 ...2
Dividing equation 2 by 1
Fsinθ/Fcosθ = (200 + 700sin15)/700cos15
Tanθ = (200 + 700sin15)/700cos15
θ = Taninverse(200 + 700sin15)/700cos15)
θ = 29.41°
From equation 1;
F = 700cos15/cosθ
F = 700cos15/cos29.41
F = 776.18N
<span>C. It is the difference in electrical potential energy between two places in an electric field.</span>
Answer:
Answer: 18.3 km/s
Explanation:
If a satellite in Molniya orbit has an apogee at 48.000 km as measured from the center of Earth, and a velocity of 3.7 km/s. Its velocity in at perigee would be 18.3 km/s.
Kepler's first law - sometimes referred to as the law of ellipses - explains that planets are orbiting the sun in a path described as an ellipse. An ellipse can easily be constructed using a pencil, two tacks, a string, a sheet of paper and a piece of cardboard. Tack the sheet of paper to the cardboard using the two tacks. Then tie the string into a loop and wrap the loop around the two tacks. Take your pencil and pull the string until the pencil and two tacks make a triangle (see diagram at the right). Then begin to trace out a path with the pencil, keeping the string wrapped tightly around the tacks. The resulting shape will be an ellipse. An ellipse is a special curve in which the sum of the distances from every point on the curve to two other points is a constant. The two other points (represented here by the tack locations) are known as the foci of the ellipse. The closer together that these points are, the more closely that the ellipse resembles the shape of a circle. In fact, a circle is the special case of an ellipse in which the two foci are at the same location. Kepler's first law is rather simple - all planets orbit the sun in a path that resembles an ellipse, with the sun being located at one of the foci of that ellipse.