Answer:
axial stress in bar B = 25Mpa.
Deformation of bar A = 0.4mm.
Explanation:
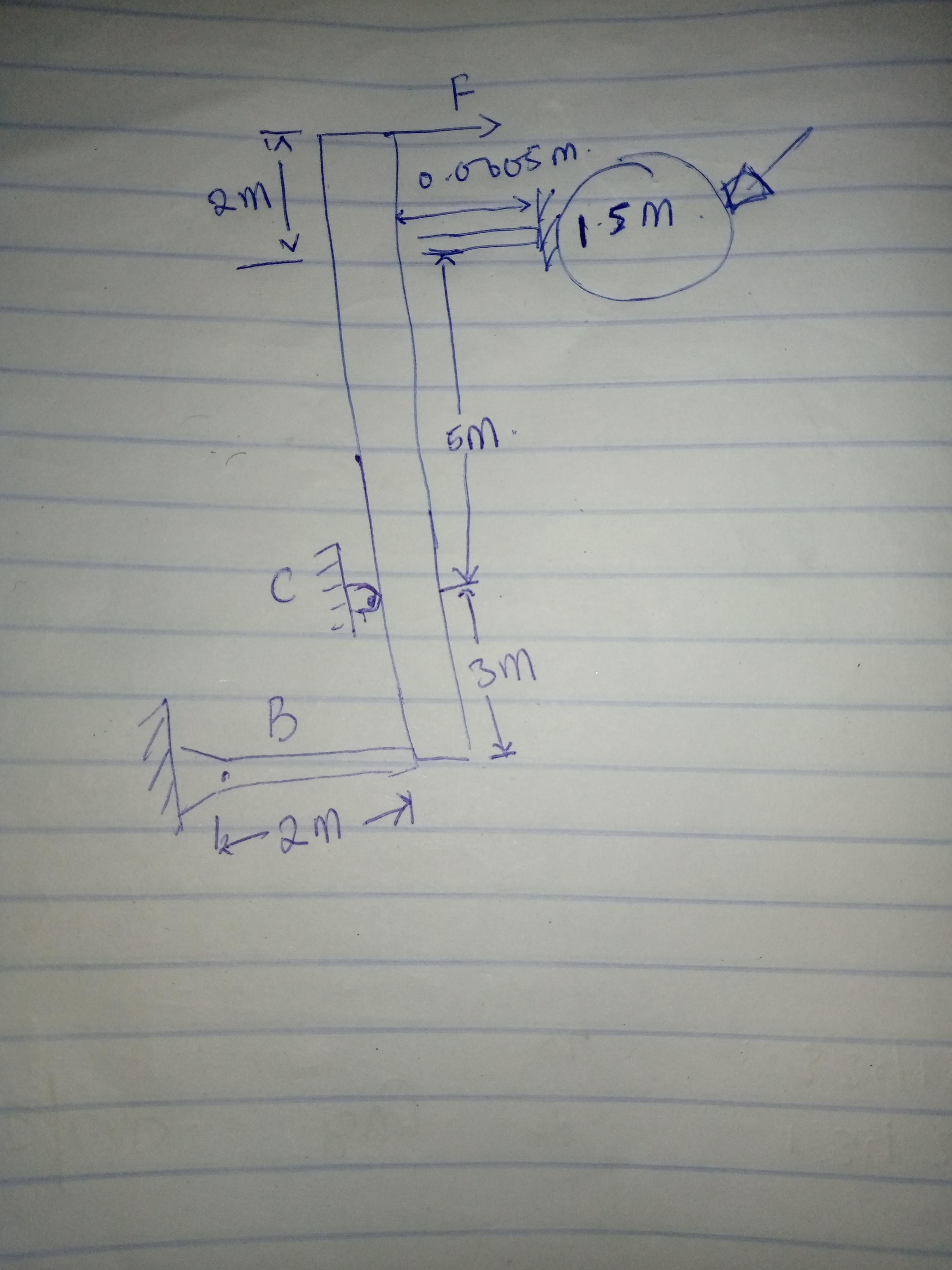
PS: Kindly check the attached picture for the diagram showing the two bars that is to say the bar A and the bar B.
So, we are given the following data or information or parameters which we are going to use in solving this particular question or problem. Here they are;
The cross-sectional areas of Bars A and B = 400 mm2, the modulus of elasticity of bar A and bar B = 200 GPa, applied force = 10kN.
STEP ONE: The first step is to determine or calculate the axial stress in bar B. Therefore,
Axial stress in bar B = 10 × 10³ ÷ 400 × 10⁻⁶ = 25 Mpa.
STEP TWO: The second step here is to determine or calculate the deformation of bar A. Therefore,
The deformation of bar A = 20 × 10³ ×1.5 ÷ 400 × 10⁻⁶ × 200 × 10³ = 0.375 mm.
Explanation:
1. A sequence of instructions is stored in memory.
2. The memory address wherever the first instruction is found is copied to the instruction pointer.
3. The CPU sends the address within the instruction pointer to memory on the address bus.
4. The CPU sends a “read” signal to the control bus.
5. Memory responds by sending a copy of the state of the bits at that memory location on the
data bus, that the CPU then copies into its instruction register.
6. The instruction pointer is automatically incremented to contain the address of the next
instruction in memory.
7. The CPU executes the instruction within the instruction register.
8. Go to step 3
Steps 3, 4, and 5 are called an instruction fetch. Notice that steps 3 – 8 constitute a cycle, the instruction execution cycle. It is shown graphically below.
A DMA controller can generate memory addresses and initiate memory read or write cycles. It contains several hardware registers that can be written and read by the CPU. These include a memory address register, a byte count register, and one or more control registers.
Answer:
Explanation:
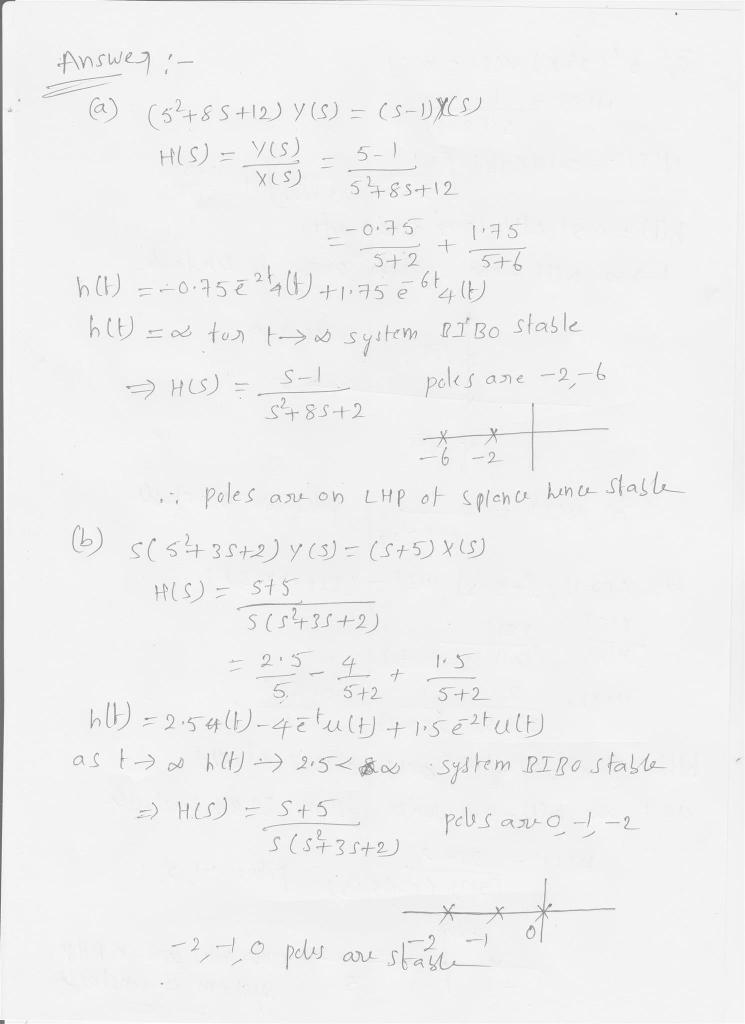
The LTIC system is the Linear Time Invariant Theory, also known as LTI system theory, investigates the response of a linear and time-invariant system to an arbitrary input signal.
For the step by step Solution to the question you asked, go through the attached documents.
Answer:
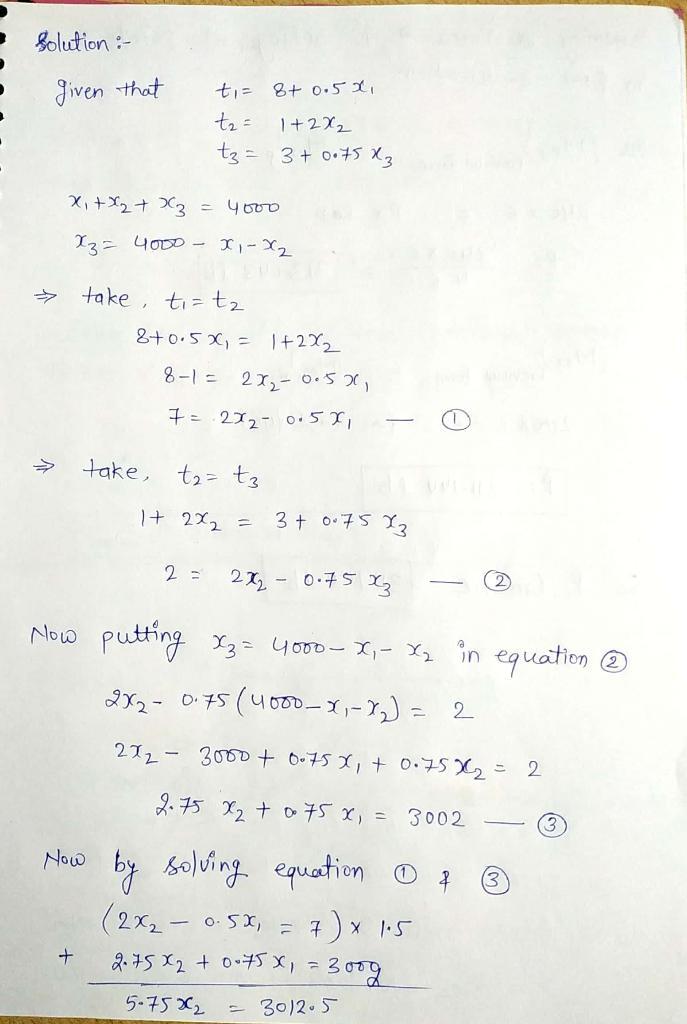
X1 = 2081.64
X2 = 523.91
X3 = 1394.45
Explanation:
See the attached pictures for detailed explanation.