5/2055 classes displayed there’s Nooooob changes
Answer:
-50.005 KJ
Explanation:
Mass flow rate = 0.147 KJ per kg
mass= 10 kg
Δh= 50 m
Δv= 15 m/s
W= 10×0.147= 1.47 KJ
Δu= -5 kJ/kg
ΔKE + ΔPE+ ΔU= Q-W
0.5×m×(30^2- 15^2)+ mgΔh+mΔu= Q-W
Q= W+ 0.5×m×(30^2- 15^2) +mgΔh+mΔu
= 1.47 +0.5×1/100×(30^2- 15^2)-9.7×50/1000-50
= 1.47 +3.375-4.8450-50
Q=-50.005 KJ
Answer:
406.140 KHz
Explanation:
Given data:
Rsig = 100 kΩ
Rin = 100kΩ
Cgs = 1 pF,
Cgd = 0.2 pF, and etc.
Determine the expected 3-dB cutoff frequency
first find the CM miller capacitance
CM = ( 1 + gm*ro || RL )( Cgd )
= ( 1 + 5*10^-3 * 25 || 20 ) ( 0.2 )
= ( 11.311 ) pF
now we apply open time constant method to determine the cutoff frequency
Th = 1 / Fh
hence : Fh = 1 / Th = 
=  = 406.140 KHz
= 406.140 KHz
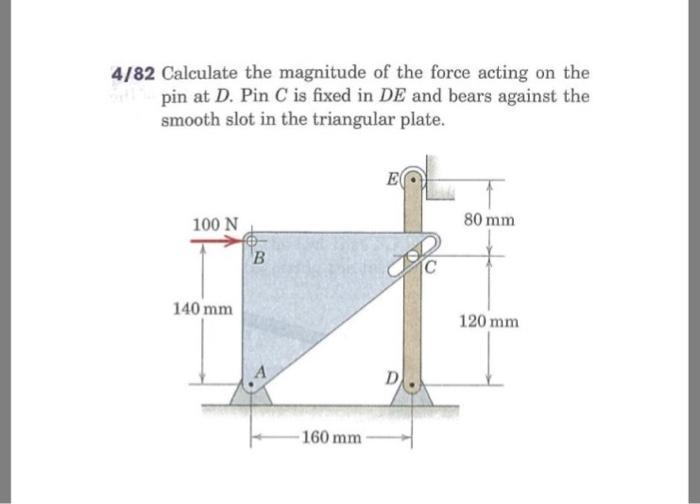
Answer:
hello your question lacks the required diagram attached below is the diagram
answer : 58.47 N
Explanation:
The magnitude of the force acting on the Pin D
Fd = 
= 
= 58.465 N
Dx = 16.80 N
Dy = 56 N
hello attached below is the detailed solution