Answer:
technically both are correct but tech b is more correct because generally the older the vehicle the worse abs is newer vehicles have abs that no matter how hard you push on the brake peddle the wheels shouldnt lock up
Explanation:
Answer:
78 MPa
Explanation:
Given that the critical resolved shear stress for a metal is 39 MPa, the maximum possible yield strength for a single crystal of this metal is twice the critical resolved shear stress for the metal. The maximum yield yield strength for a single crystal of this metal that is pulled in tension ( ) is given as:
) is given as:

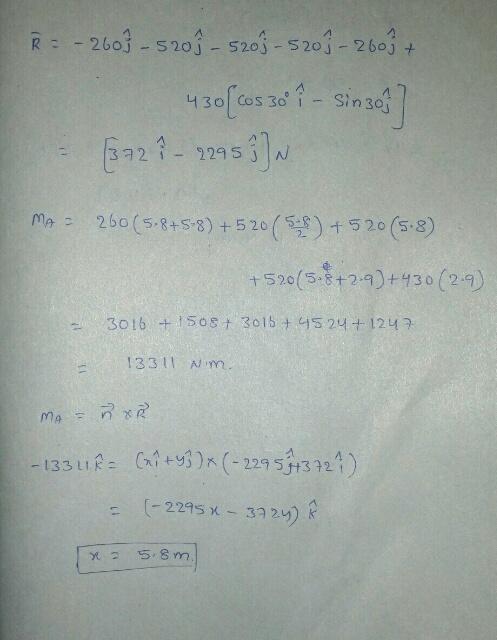
Answer:
Check the explanation
Explanation:
Kindly check the attached image below to see the step by step explanation to the question above.