Answer: hello the steel beam related to your question is missing attached below is the missing diagram
answer : max stress = -14.32 ksi
Explanation:
<em>For a W16 * 50 beam </em>
I = 659 in
d = 16.26 in
For steel : E = 29 * 10^3 ksi
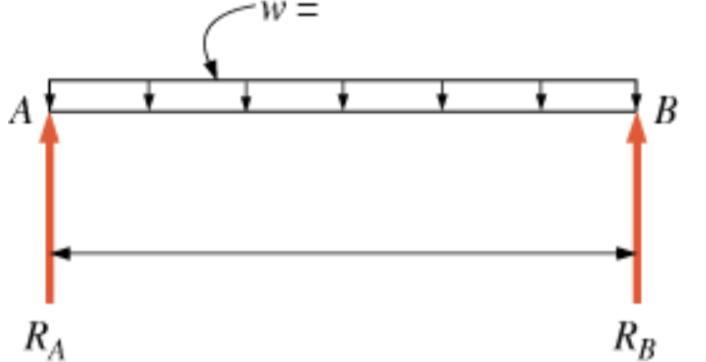
Span ( length ) of steel beam = 26'
uniformly distributed load on the steel beam = 2.3 k/ft
load at middle = 8 kip , Distance from middle to either Ra or Rb = 13'
<em>First step : calculate the value of Rb and Ra </em>
∑Ma = 0
0 = ( 8 * 13 )+ (26 * 2.3 * 13 ) - Rb * 26
∴ 25 Rb = 881.4
Hence: Rb = 35.256 kip
∑fy = 0
0 = Ra + Rb - 2.3 * 26 - 8
Ra = 67.8 - Rb = 67.8 - 35.256
= 32.54 kip
second step :
Mmax = Mmidpoint
∴ Mmax = Ra * 13 - 2.3 ( 13 ) * (26/4 )
= 32.54 * 3 - 2.3 ( 13 ) * (26/4 )
= 97.62 - 194.35 = -96.73 kip fit
<u>Finally determine the maximum bending stress </u>
бmax = M * ( d/2 ) / I
= - 96.73 * ( 16.26 / 2 )*12 / 659
= -96.73 * 97.56 / 659 = -14.32 ksi
<u />
<u />