We are asked to determine the velocity of a rain drop if it falls from 4 km.
To do that we will use the following formula:

Where:

If we assume the initial velocity to be 0 we get:

The acceleration is the acceleration due to gravity:

Now, we take the square root to both sides:

Now, we substitute the values:

solving the operations:

Therefore, the velocity without air drag is 280 m/s.
Part B. we are asked to determine the velocity if there is air drag. To do that we will use the following formula:

Where:

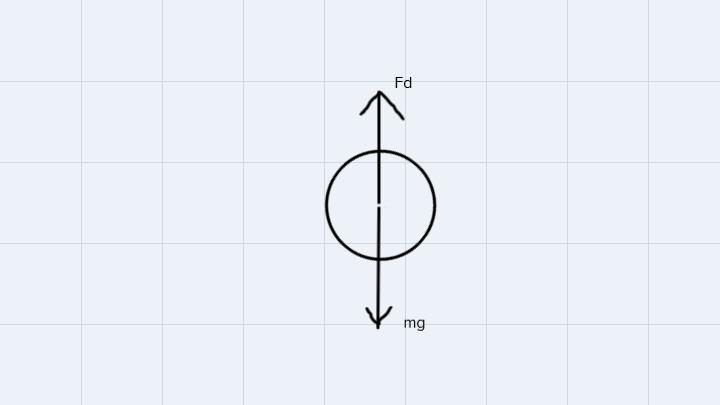
We need to determine the drag force. To do that we will use the following free-body diagram:
Since the velocity that the raindrop reaches is the terminal velocity and its a constant velocity this means that the acceleration is zero and therefore the forces are balanced:

Now, we determine the mass of the raindrop using the following formula:

Where:

The volume is the volume of a sphere, therefore:

Since the diameter of the raindrop is 3 millimeters, the radius is 1.5 mm or 0.0015 meters. Substituting we get:

Solving the operations:

Now, we substitute the values in the formula for the drag force:

Solving the operations:

Now, we substitute in the formula:

Now, we solve for the velocity:

Now, we substitute the values. We will use the area of a circle:

Substituting the radius:

Solving the operations:

Now, we take the square root to both sides:

Therefore, the velocity is 8.4 m/s