Answer:
a. 33120MJ
b. 5.6
c. 48
Explanation:
∆U= 120,000 KJ/h
Since
1 day = 24 hrs
14 days =24 x 14 hrs
14 days = 336 hrs
∆U = 120000 x 336 KJ
=40320000KJ
K = 1000
M = 1000000
∆U = 403200 MJ
Work done
W= 2000 KW.h ( 1 h = 3600 s)
W= 7200 MJ
According to the first law of thermodynamics
∆U = Q+W
Q= 40320 - 7200 MJ
1)Qa=33120 MJ
Coefficient of performance
COP = ∆U/W
COP= 40320 / 7200
2)COP = 5.6
3)COP of ideal heat pump
Th/(Th - Tl)
Th = 15°C
Tl = 9°C
Convert Celsius to Kelvin
273 + 15 = 288
288/(15-9)
288/6
48
COP= 48
Answer:
stop and might even crash
Explanation:
Answer:
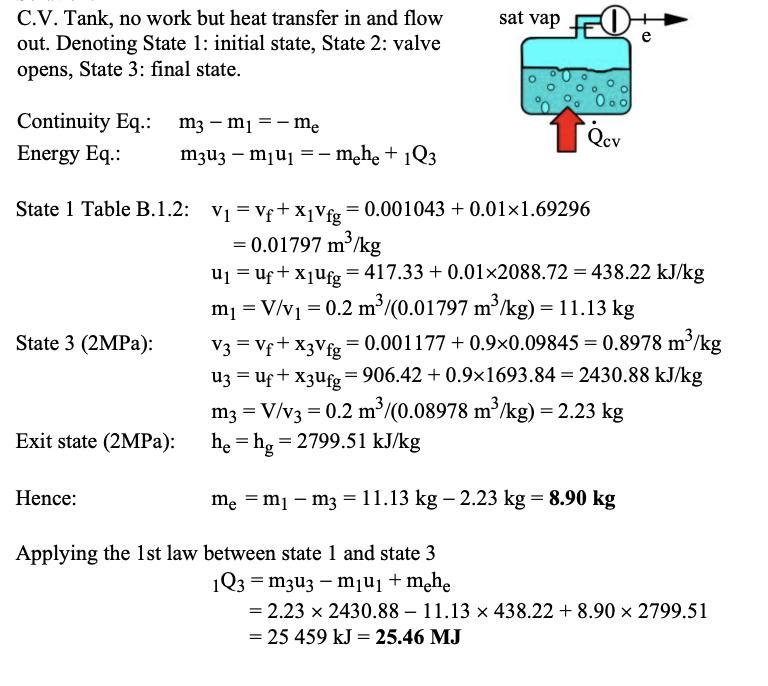
25.46 MJ
Explanation:
continuity : m3 - m1 = -m<em>e</em>
<em>Energy Equation: m3u3 - m1u1 = -meue + 1Q3</em>
<em />
<em>See the image attached (Well typed out format)</em>
Answer:
- Driving surface area as subject to differential pressures
- How to achieve continuous rotation
- Mechanical connections
Explanation:
The general stages of thinking when designing a system are;
- First understanding the problem that requires you to design a solution
- Defining the problem that needs to be solved. In this case is to design an efficient hydraulic engine for a motorboat
- Research to find any available solutions for similar problems
- Idea of the solution
- A prototype to try solve the challenge
- Selecting and adjusting the prototype as you implement the solution.
For a hydraulic engine design, the following designing parts are vital;
- Driving surface area as subject to differential pressures
- How to achieve continuous rotation
- Mechanical connection
Pressures are important due to motor displacements. Fuel burns in the cylinder to cause power through fuel gases burning and expansion which is the four-stroke cycle. Continuous rotation will come in the design considerations through reciprocating motions of pistons into rotary motions. Mechanical connections are vital especially in crank shaft turns, gear box that turns horizontal motions to spinning motions and finally the propeller that drives the boat on the water.
Explanation:
uuui ielts k oshru with the best of my life u