Answer:
#include<stdio.h>
#include<math.h>
void output_amortized(float loan_amount,float intrest_rate,int term_years)
{
int i,j; //Month
int payments; //Number of payments
float loanAmount; //Loan amount
float anIntRate; //Yealy interest Rate
float monIntRate; //Monthly interest rate
float monthPayment; //Monthly payment
float balance; //Balance due
float monthPrinciple; //Monthly principle paid
float monthPaidInt; //Month interest paid
balance=loan_amount;
//Calculations
//Monthly interest rate
monIntRate = ((intrest_rate/(100*12)));
//Monthly payment
payments=term_years;
monthPayment = (loan_amount * monIntRate * (pow(1+monIntRate, payments)/(pow (1+monIntRate, payments)-1)));
monthPaidInt = balance * monIntRate;
//Amount paid to principle
monthPrinciple = monthPayment-monthPaidInt;
//New balance due
balance = balance - monthPrinciple;
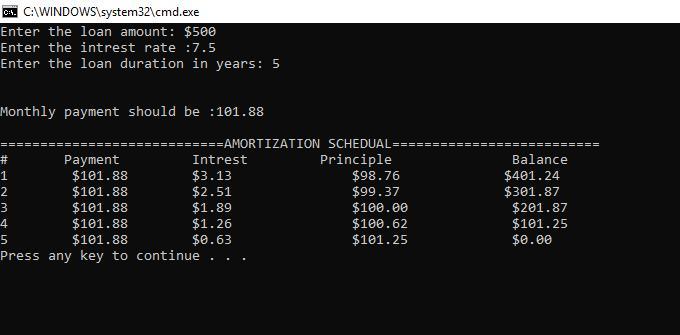
printf("\n\nMonthly payment should be :%.2f\n\n",monthPayment);
printf("============================AMORTIZATION SCHEDUAL==========================\n");
printf("#\tPayment\t\tIntrest\t\tPrinciple\t\tBalance\n");
for(i=0;i<payments;i++)
{
printf("%d%9c%.2f%9c%.2f%16c%.2f%14c%.2f\n",(i+1),'$',monthPayment,'$',monthPaidInt,'$',monthPrinciple,'$',balance);
monthPaidInt = balance * monIntRate;
//Amount paid to principle
monthPrinciple = monthPayment-monthPaidInt;
//New balance due
balance = balance - monthPrinciple;
}
}
int main()
{
float principle,rate;
int termYear;
printf("Enter the loan amount: $");
scanf("%f",&principle);
printf("Enter the intrest rate :%");
scanf("%f",&rate);
printf("Enter the loan duration in years: ");
scanf("%d",&termYear);
output_amortized(principle,rate,termYear);
}
Explanation:
see output