Rita measured distances that a small boat traveled over 30 s. She wants to create a distance-time graph to show her data. Which of the following should Rita put on the vertical Y axis?
1 answer:
I’m pretty sure you use distance
You might be interested in
Answer:
The substance in is at state of gas.
Explanation:
Please see attavhed document
Answer:
6.48*10⁻⁷ C
Explanation:
By definition, the capacitance of a capacitor is expressed as follows:
where Q is the charge on one of the plates of the capacitor, and V the potential difference between the plates. The maximum electric field, the potential difference, and the distance between plates are related by the following expression:
Replacing by the givens, we can find V as follows:
Now, we can find the maximum charge Qmax, as follows:
The maximum charge that the capacitor can hold is 6.48*10⁻⁷ C.
When an earthquake strikes usually seismic waves carry the energy outward (a.) With the greatest power at the focus and as the seismic waves travel outward they become more and more weak until they disappear.<span />
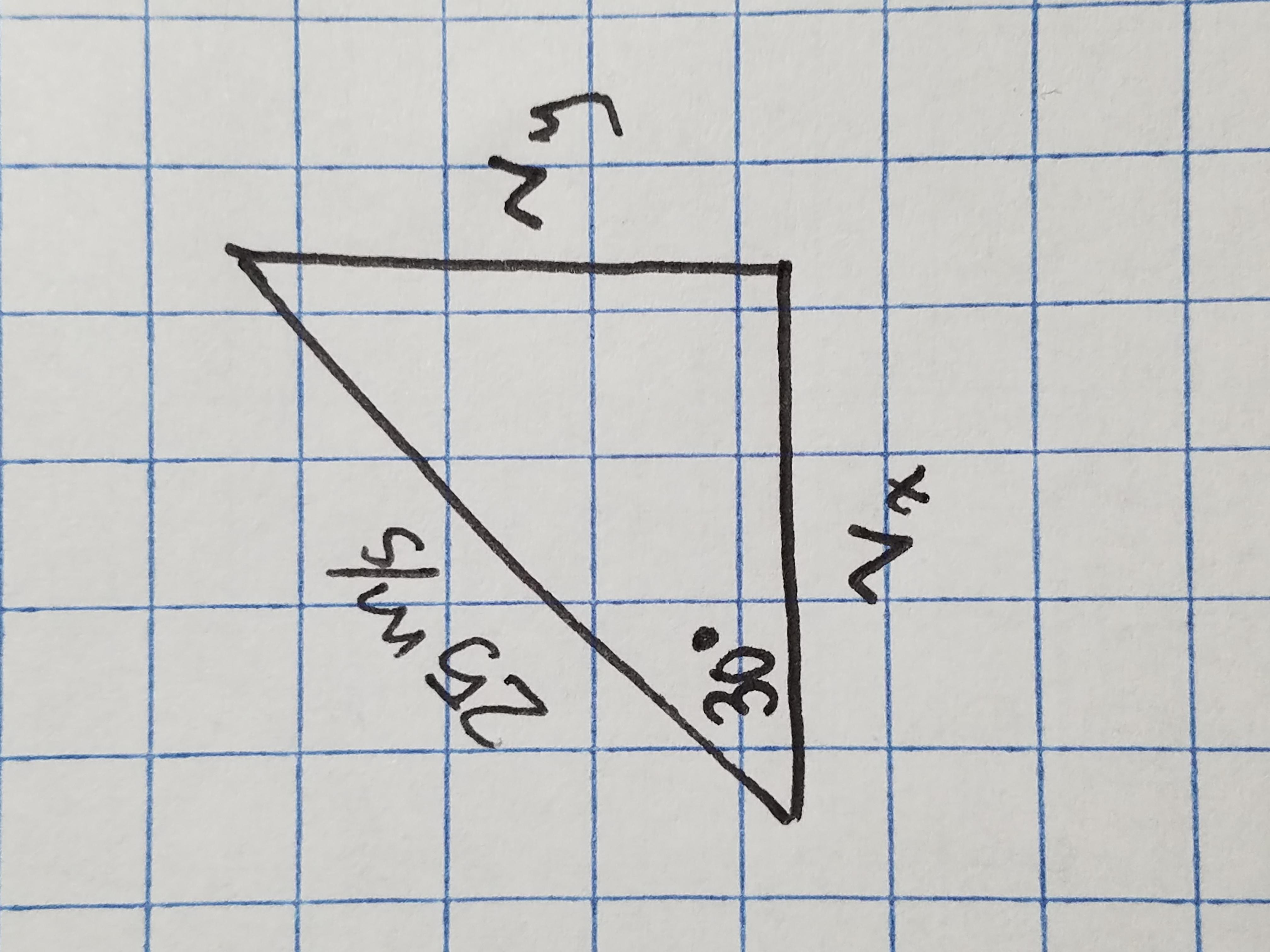
Answer:
sin 30° =
Multiply each side by 25 to cancel the 25 under
(25)· sin 30° =
Multiply everything on the left side.
12.5
I attached a picture, I hope it helps.