Answer:
In Rankine 524.07°R
In kelvin 291 K
In Fahrenheit 64.4°F
Explanation:
We have given temperature 18°C
We have to convert this into Rankine R
From Celsius to Rankine we know that 
We have to convert 18°C
So 
Conversion from Celsius to kelvin

We have to convert 18°C

Conversion of Celsius to Fahrenheit

Answer:
Maybe when there is a fire there can be fire drones that can take it out. and it can also resuce people who are stuck there.
Explanation:
Answer:
At the point when the quantity of bit strings is not exactly the quantity of processors, at that point a portion of the processors would stay inert since the scheduler maps just part strings to processors and not client level strings to processors. At the point when the quantity of part strings is actually equivalent to the quantity of processors, at that point it is conceivable that the entirety of the processors may be used all the while. Be that as it may, when a part string obstructs inside the portion (because of a page flaw or while summoning framework calls), the comparing processor would stay inert. When there are more portion strings than processors, a blocked piece string could be swapped out for another bit string that is prepared to execute, in this way expanding the use of the multiprocessor system.When the quantity of part strings is not exactly the quantity of processors, at that point a portion of the processors would stay inert since the scheduler maps just bit strings to processors and not client level strings to processors. At the point when the quantity of bit strings is actually equivalent to the quantity of processors, at that point it is conceivable that the entirety of the processors may be used at the same time. Be that as it may, when a part string hinders inside the piece (because of a page flaw or while summoning framework calls), the relating processor would stay inert. When there are more portion strings than processors, a blocked piece string could be swapped out for another bit string that is prepared to execute, along these lines expanding the usage of the multiprocessor framework.
<u>Explanation:</u>
1) When we invest in stock it means we are investing in long term investment. It includes risk factor also.
2) We can make money from stocks by retaining them for a long period and selling them when their price rises.
3) dividends are paid out of distributable profits. Some companies provide dividends regularly which act as a regular source of income for investors.
4) Capital gain is the benefit obtained on selling a capital asset and if we face loss on selling the capital asset it results in capital loss. Capital assets are like stock, bonds, properties, etc.
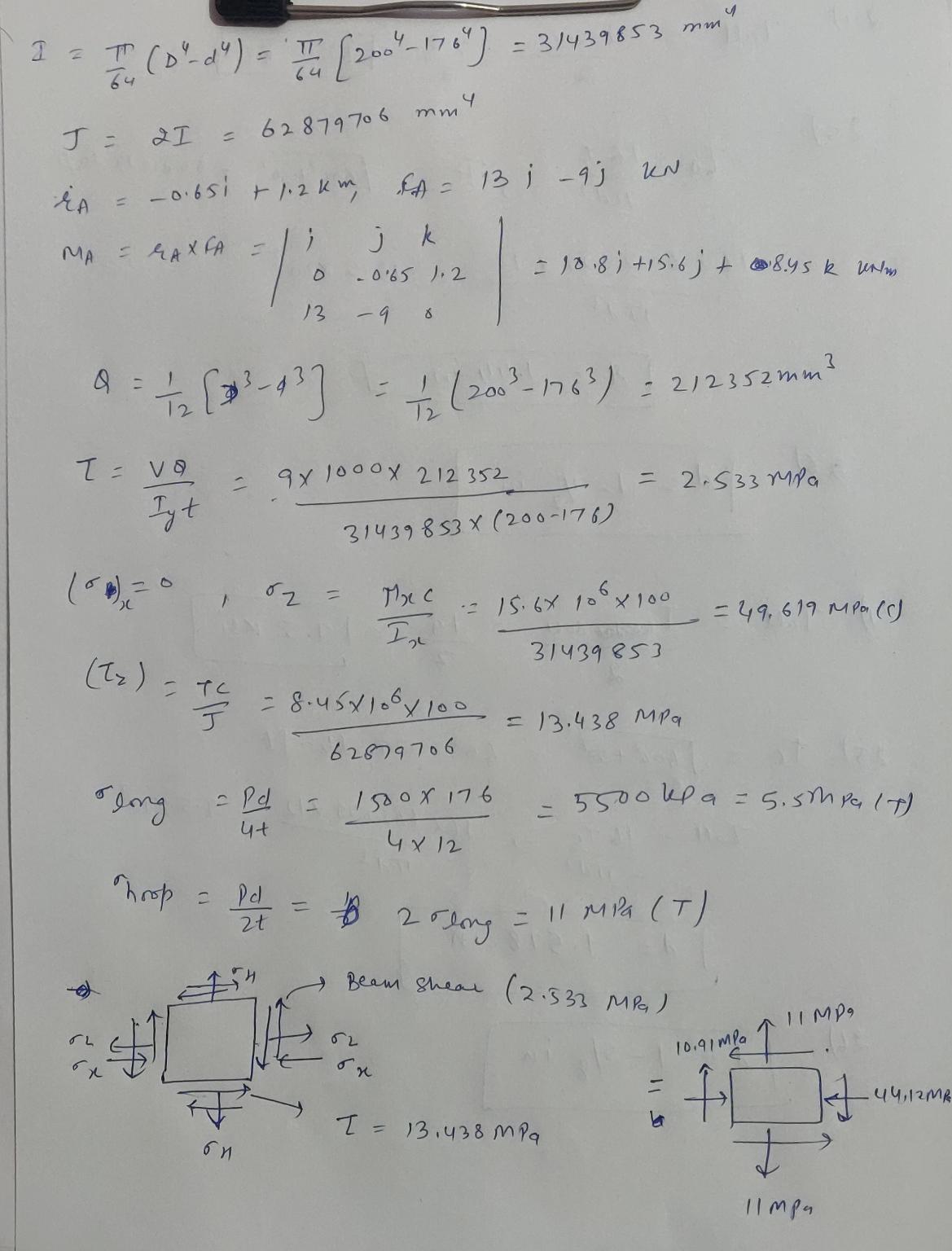
Answer:
See explaination
Explanation:
please kindly see attachment for the step by step solution of the given problem.