Over the first 16.4 m, the person performs
<em>W</em> = (60.0 N) (16.4 m) = 984 J
of work.
Over the remaining 6.88 m, they perform a varying amount of work according to
<em>F(x)</em> ≈ 60.0 N + (-8.72 N/m) <em>x</em>
where <em>x</em> is in meters. (-8.72 is the slope of the line segment connecting the points (0, 60.0) and (6.88, 0).) The work done over this interval can be obtained by integrating <em>F(x)</em> over the interval [0, 6.88 m] :
<em>W</em> = ∫₀⁶˙⁸⁸ <em>F(x)</em> d<em>x</em> ≈ 206.4 J
(Alternatively, you can plot <em>F(x)</em> and see that it's a triangle with base 6.88 m and height 60.0 N, so the work done is the same, 1/2 (6.88 m) (60.0 N) = 206.4 J.)
So the total work performed by the person on the box is
984 J + 206.4 J = 1190.4 J ≈ 1190 J
Answer:
Explanation:
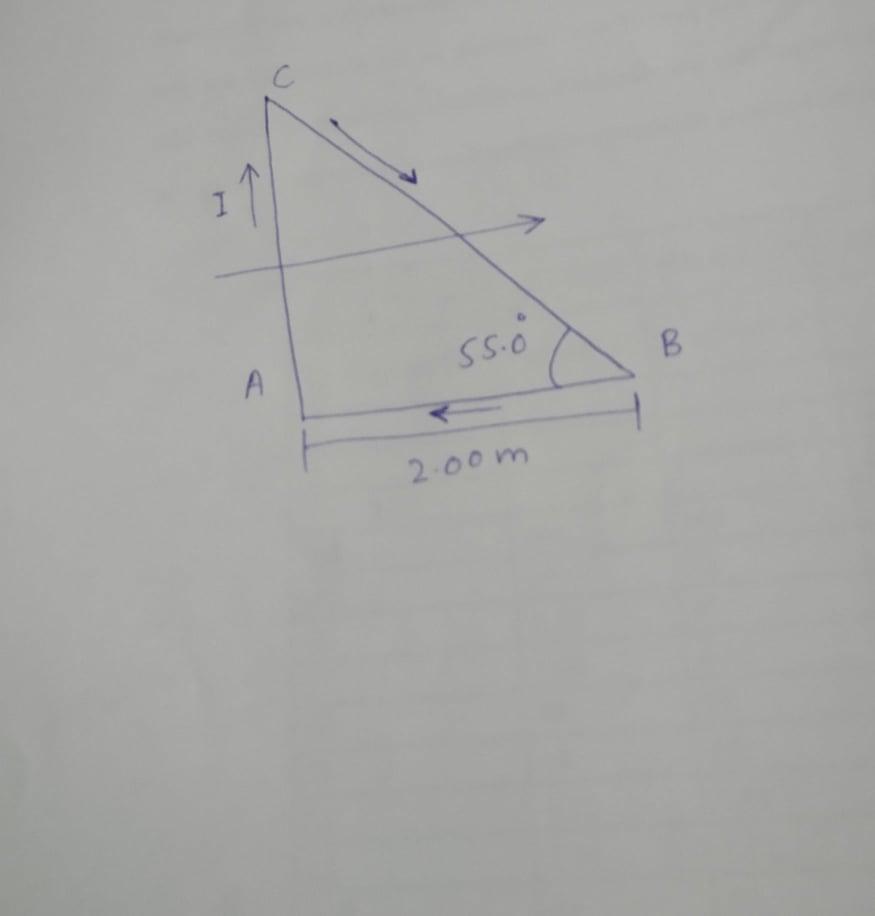
The magnetic moment of a current loop is simply the current times the area of the loop. In this case...
height of triangle = 2.00*tan(55) = 2.856 m
Area=0.5*base*height
=0.5*2*2.856
=2.856 m²
a)
magnetic moment = area * current = 2.856 * 5.26 = 14.994 A.m²
b)
then the torque is simply the B field times the magnetic moment
torque = B * mag moment = 1.6 * 15.022 = 24.03 N-m
Answer:
See explanation
Explanation:
Given that;
q1 and q2 are the magnitudes of the two charges while r1 is the distance between the charges.
F1 =kq1q2/r1^2
Then,
F2 = kq1q2/(2r1)^2
F2 = kq1q2/4r1^2
So,
F2 = 1/4 F1
The force between the charges changes by a factor of 1/4.
Positive or negative charge (because an atom becomes an ion when it loses or gains electrons, changing the neutral charge)