Answer:
See below
Explanation:
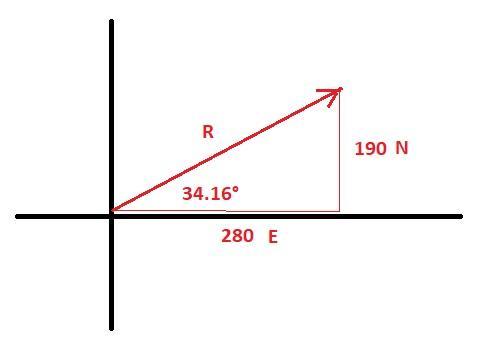
See attached diagram
280 km east then 190 km north
Use Pythagorean theorem to find the resultant displacement
d^2 = 280^2 + 190^2
d = 338.4 km
Angle will be arctan ( 190/280) = 34.16 °
<em>The </em><em>nucleus</em><em> has most of the atomic mass in an atom. The </em><em>nucleus</em><em> is made up of protons and neutrons.</em>
<em />
Answer:
The maximum velocity is 0.377 m/s
Explanation:
Please, the solution is in the Word file attached
Answer:
encontré esto fuera de google, "Estos conceptos físicos que parecen necesarios en cualquier teoría física suficientemente amplia son los llamados conceptos físicos fundamentales, una lista no exhaustiva de los mismos podría ser: espacio, tiempo, energía, masa, carga eléctrica, etc."
espero que esto ayude, que tengas un gran día, Y mantente segura! :) :D :3