D i took this hope it helps
Answer:
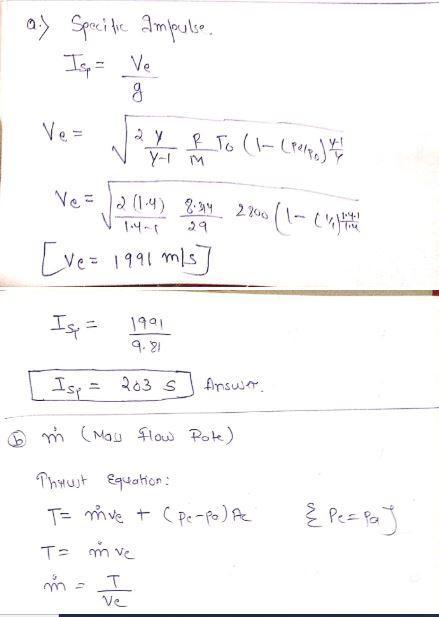
a) specific impulse = 203 s
(b) mass flow rate = 2511 kg/s
(c) throat diameter = 0.774 m
(d) exit diameter = 1.95 m
(e) thrust = 5.3*10^6 N/m^2
(f) thrust at sea level = 15.6*10^6 N
(g) thrust with hydrogen = 5*10^6 N
(h) thrust with stagnation = 5*10^6 N
Explanation:
See the attached file for explanation.
Answer:
True.
Explanation:
According the engineering flow they don not possess flow energy when they are in rest.
When they are in motion they show a translation energy.
The features if fluids may be different according the variables of pressure and temperature.
Tell me why i got this question got it right and now won’t remember but i’ll get back at you when i remember
Answer:
Explanation:
The rank of the magnitude of the diffusion coefficient from greatest to least is as follows:
C in Fe at 900°C > Cr in Fe at 900°C > Cr in Fe at 600°C
Reason
C in Fe is an interstitial impurity while Cr in Fe is a substutional impurity.Therefore interstitial impurity occurs in C in Fe systems,while substutitional diffusion occurs in Cr in Fe system.Interstitial is much faster than substitutional diffusion hence the order
Also with increasing temperature magnitude of diffusion coefficient increases,due to the relation.
D = D₀exp(-Qd/RT)
Where D₀=Temperature independent per exponential
Qd= The activation energy for diffusion
R= Universal gas constant
T=absolute temperature