Answer:
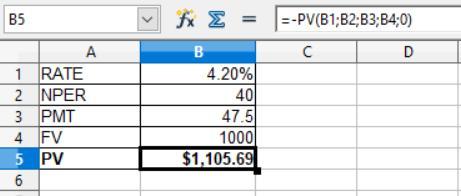
$1,105.69
Explanation:
For this question we use the Present value formula that is shown on the attachment. Kindly find it below:
Given that,
Future value = $1,000
Rate of interest = 8.4% ÷ 2 = 4.2%
NPER = 20 years × 2 = 40 years
PMT = $1,000 × 9.5% ÷ 2 = $47.50
The formula is shown below:
= -PV(Rate;NPER;PMT;FV;type)
So, after solving this, the maximum price pay for the bond is $1,105.69
Answer:
1. A fossil that is widespread geographically but only occurs in one layer or a small number of layers of rock
2. Sediment deposited into water will spread in a horizontal and continuous sheet
3. Any undisturbed sequence of layered rocks has the oldest rock on the bottom and newest rock on the top
4. Study of fossils
5. Study of rock layers and the process that form them
Sorry if any of these are wrong
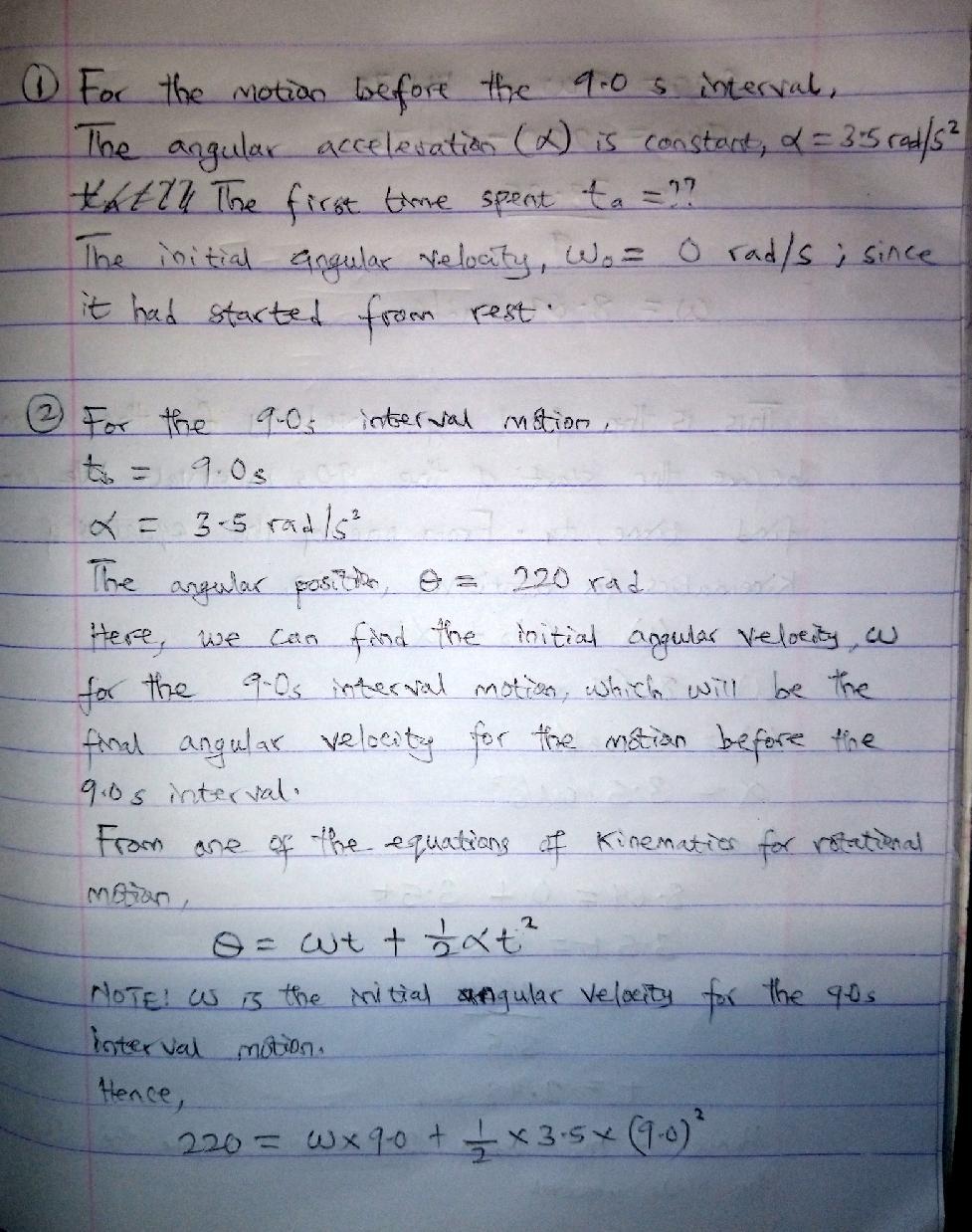
Answer: It had been 2.48 s before the start of the 9.0 s interval
Explanation: Please see the attachments below