Answer:
<h2>a) 50°</h2><h2>b) 40°</h2>
Explanation:
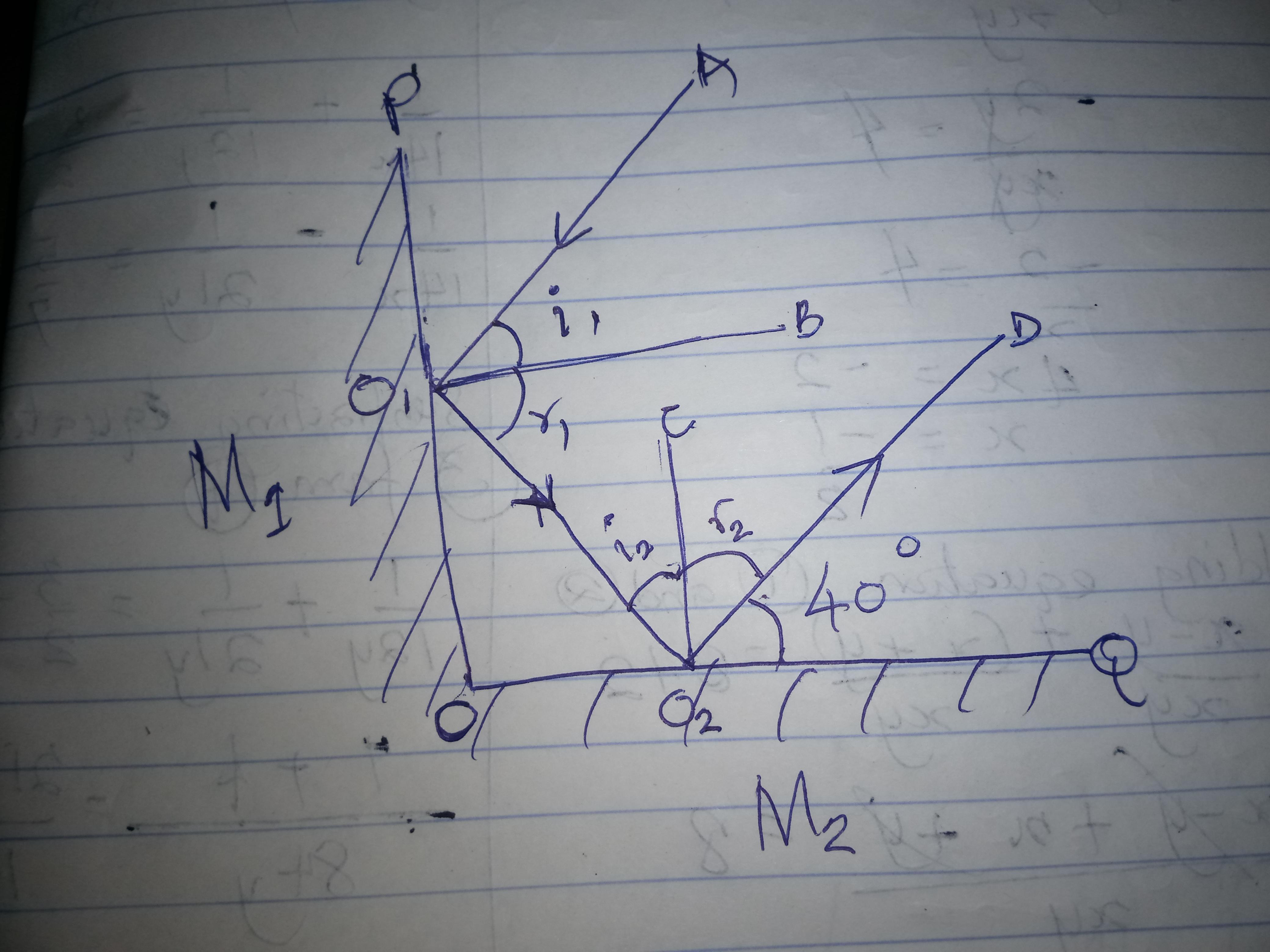
Check the complete diagram n the attachment below
a) The angle of incidence on a plane surface is the angle between the incidence ray and the normal ray acting on a plane surface. The normal ray is the ray perpendicular to the surface while the incidence ray is the ray striking a plane surface.
According to the diagram, the angle of reflection r₂ on M₂ is 90°-g where g is the angle of glance.
Given angle of glance on M₂ to be 40°, r₂ = 90-40 = 50°
According the second law of reflection, the angle of incidence = angle of reflection, therefore i₂ = r₂ = 50° (on M₂)
Also ∠OO₂O₁ = ∠OO₁O₂ = 40° (angle of glance on M₁){alternate angle}
The angle of incidence on M₁ = 90° - 40° = 50°
b) The angle of incidence to the surface of M₁(∠PO₁A)will be the angle of glance on M₁ which is equivalent to 40°
Answer:
B
Explanation:
Density is about how closely compact molecules are. (^-^)
40V because it will provide the same amount of power.
Answer:
Explanation:
distance of fan A = 18.3 m
distance of fan B = 127 m
speed of sound (s) = 343 m/s
What is the time difference between hearing the sound at the two locations?
time (T) = distance / speed
- time for sound to reach fan A = 18.3 / 343 = 0.053 s
- time it takes for sound to reach fan B = 127 / 343 = 0.370 s
- time difference = 0.370 - 0.053 = 0.317 s