Answer:
hello your question incomplete attached below is the complete question and detailed solution
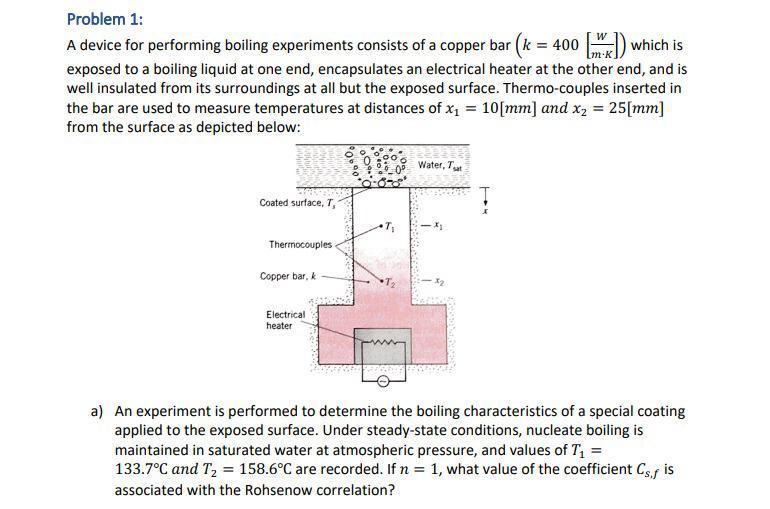
Answer : Csf = 0.0131
Explanation:
Attached below is the detailed solution
Given data :
ΔTe = 17.1⁰c calculated as ;Ts - Tsat = ( 117.1 - 100 )
Pe = 957.9 kg/m^3
Cp1e = 4217 j/kgk
<em>U</em>e = 279 * 10^-6 n. s / m^2
Pre = 1.76
hfg = 2.257 * 10^6 J/kg
Pv = 0.5955 kg/m^3
б = 0.0589 N/m
q" = 664 * 10^3 w/m^2 ( calculated )
Input these values into equation 1 as contained in the detailed solution
Csf = 0.0131
Answer:
yes for sure
Explanation:
iran oy has 3000 ballistic missiles but america has thousands of nukes. we can easily outnumber their forces as well. this will be a easy victory for us but will result in massive casualties on both sides
Answer:
something that involves cars
Explanation:
Answer:
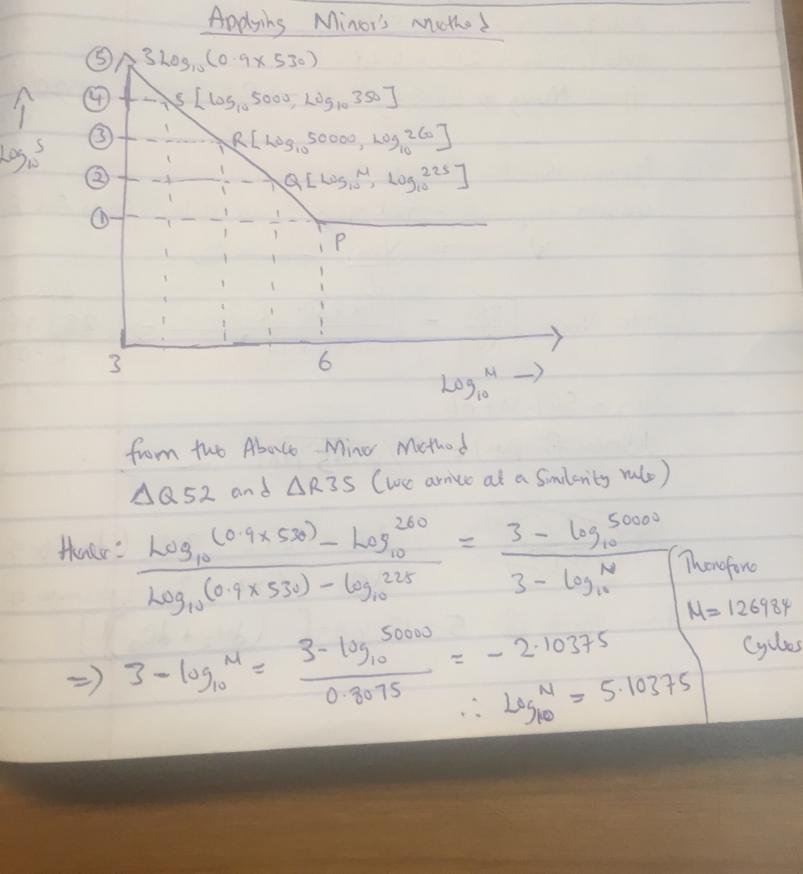
126984 cycles
Explanation:
Given data :
Sut = 530 MPa
f = 0.9
fully corrected Se = 210 MPa
using Miner's method attached below is the detailed solution of the given problem
when loaded with ± 225 MPa the number of cycles before it fails will be
≈ 126984