A high voltage!! Hope this helps
Answer:
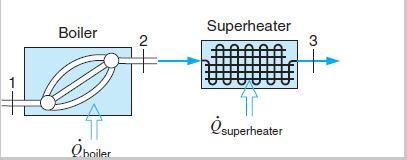
hello the figure attached to your question is missing attached below is the missing diagram
answer :
i) 1.347 kW
ii) 1.6192 kW
Explanation:
Attached below is the detailed solution to the problem above
First step : Calculate for Enthalpy
h1 - hf = -3909.9 kJ/kg ( For saturated liquid nitrogen at 600 kPa )
h2- hg = -222.5 kJ/kg ( For saturated vapor nitrogen at 600 kPa )
second step : Calculate the rate of heat transfer in boiler
Q1-2 = m( h2 - h1 ) = 0.008( -222.5 -(-390.9) = 1.347 kW
step 3 : find the enthalpy of superheated Nitrogen at 600 Kpa and 280 K
from the super heated Nitrogen table
h3 = -20.1 kJ/kg
step 4 : calculate the rate of heat transfer in the super heater
Q2-3 = m ( h3 - h2 )
= 0.008 ( -20.1 -(-222.5 ) = 1.6192 kW
The most accurate answer to that process is definitely precision. The Rotary encoder is an electro-mechanical device that converts the angular position or motion of a shaft or axle to analog or digital output signals. The efficiency of these devices is subject to the position and angle of the axis in front of the encoder.
Most cars use reduction systems in their gearboxes that convert a certain signal input into an output. Mechanically for example, a 20: 1 reduction box already infers that if there is a revolution in the input at the output there are 20. That same transferred to the encoder pulses would imply greater precision.
For example a decoder with 50 holes would have to read 1000 pulses (50 * 20) which is basically a degree of accuracy of 0.36 degrees. In this way it is possible to conclude that if the assembly of the encoder is carried out next to the motor and not at the output, it can be provided with greater precision at the time of reading.
Answer:
I think reduce your following distance
Answer:
Explanation:
30 we know that radius is 18 and the circumference is 36pi and the time to go around is is 36pi/30=1.2pi≈3.76991118