Answer:
a. 8.96 m/s b. 1.81 m
Explanation:
Here is the complete question.
a) A long jumper leaves the ground at 45° above the horizontal and lands 8.2 m away.
What is her "takeoff" speed v
0
?
b) Now she is out on a hike and comes to the left bank of a river. There is no bridge and the right bank is 10.0 m away horizontally and 2.5 m, vertically below.
If she long jumps from the edge of the left bank at 45° with the speed calculated in part a), how long, or short, of the opposite bank will she land?
a. Since she lands 8.2 m away and leaves at an angle of 45 above the horizontal, this is a case of projectile motion. We calculate the takeoff speed v₀ from R = v₀²sin2θ/g. where R = range = 8.2 m.
So, v₀ = √gR/sin2θ = √9.8 × 8.2/sin(2×45) = √80.36/sin90 = √80.36 = 8.96 m/s.
b. We use R = v₀²sin2θ/g to calculate how long or short of the opposite bank she will land. With v₀ = 8.96 m/s and θ = 45
R = 8.96²sin(2 × 45)/9.8 = 80.2816/9.8 = 8.192 m.
So she land 8.192 m away from her bank. The distance away from the opposite bank she lands is 10 - 8.192 m = 1.808 m ≅ 1.81 m
Answer:
Perm lasts longer
Explanation:
Cuz a chemical relaxer only lasts a few weeks and a perm lasts a few months hope this helps
Answer:
A) the maximum acceleration the boulder can have and still get out of the quarry
B) how long does it take to be lifted out at maximum acceleration if it started from rest
Explanation:
A)
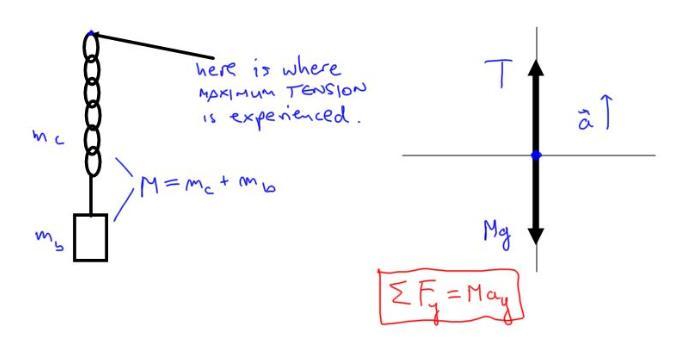
let +y is upward. look below at the free body diagram. the mass M refers to the combined mass of the boulder and chain.
the weight of the chain is:  and maximum tension is
and maximum tension is 
total mass and weight is :


∑



B)
maximum acceleration

using 
to solve for t


I believe the correct answer would be kimberlite. Diamonds are usually found in pipes 50 to 200 m across made of kimberlite. It is an igneous rock that is known to contain traces of diamonds. It is named base on the town where it was discovered which is Kimberley, South Africa.