The rate of gain for the high reservoir would be 780 kj/s.
A. η = 35%

W = 
W = 420 kj/s
Q2 = Q1-W
= 1200-420
= 780 kJ/S
<h3>What is the workdone by this engine?</h3>
B. W = 420 kj/s
= 420x1000 w
= 4.2x10⁵W
The work done is 4.2x10⁵W
c. 780/308 - 1200/1000
= 2.532 - 1.2
= 1.332kj
The total enthropy gain is 1.332kj
D. Q1 = 1200
T1 = 1000

<h3>Cournot efficiency = W/Q1</h3>
= 1200 - 369.6/1200
= 69.2 percent
change in s is zero for the reversible heat engine.
Read more on enthropy here: brainly.com/question/6364271
It has the same limit of each angle
Answer:
A drivetrain allows a robot to be mobile by using wheels, tank treads, or another method. A drivetrain is sometimes referred to as a drive base. Identifying which kind of drivetrain to use is one of the first considerations when designing a robot.
Explanation:
Hope this helps! Brainliest plz!
Answer:
a) 512.5 KW/m2
b) 40.75 KW/m2
c) 2 KW/m2
Explanation:
Given data;
T_2 = 325 K
T_1 = 275 K
dx = 0.20 mm
a) for aluminium K = 205 W/m k
heat flux 

= 512.5 KW/m2
b) for AISI 316 stainless steel
k = 16.3 W/ m k
heat flux

= 40.75 KW/m2
C) for Concrete
k = 0.8 W/ m k
heat flux

= 2 KW/m2
Answer:
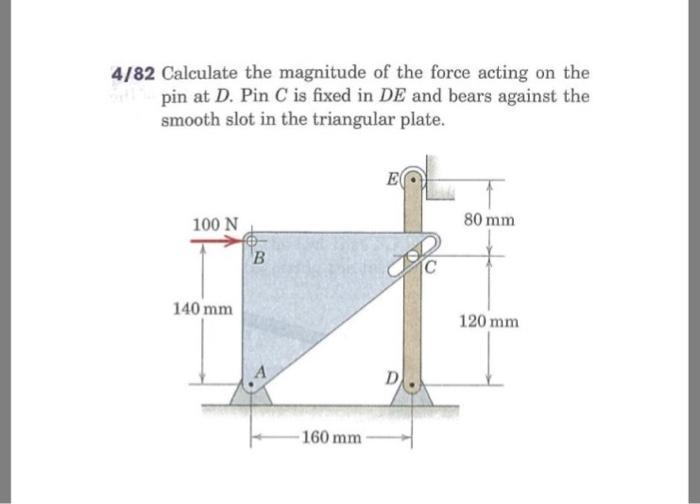
hello your question lacks the required diagram attached below is the diagram
answer : 58.47 N
Explanation:
The magnitude of the force acting on the Pin D
Fd = 
= 
= 58.465 N
Dx = 16.80 N
Dy = 56 N
hello attached below is the detailed solution