Answer:
They will be 140 miles apart 8 hours after the first boy started the trip or 6 hours after the second boy started the trip.
Explanation:
x = the time that the first boy travels at 14 mph
x - 2 = the time the second boy travels at 14 mph
140 the distance between them
Since one travels north and the other east (their roads are perpendicular) the distance between them can be calculated using Pythagorean Theorem
(14*x)^2 + ((x-2)*14)^2 = 140^2
the solutions of the quadratic equation are
x1 = - 6 is not the solution since x > 0
x2 = 8 h is the solution
<u><em>
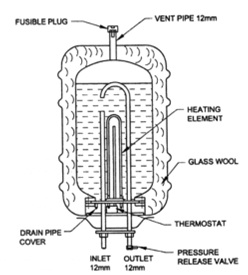
Working of Electric Geyser:
</em></u><em>
simply in our homes ,, in electric geysers electric energy is converted into heat energy ,, when cold water enters into the geyser through inlet then it is heated into a container inside the geyser,,when it is heated connection of electricity is cut off inside the geyser,,
</em><em>then this hot water comes out through a outlet ... :)</em>
You need to know the mass number to work it out. I can see you have it but it's not visible on your photo.
Every proton weighs 1 and every neutron weighs 1 so if you know the total mass of the nucleus and the number of protons, then you can do:
Mass Number - Proton Number = Neutron Number
because the rest of the mass (that isn't from the protons) must come from the neutrons. Make sense?
Answer:
7.3cm above the compressed spring.
Explanation:
We can use the conservation energy theorem to solve this problem:

The block was dropped 7.3cm above the compressed spring.